Nyfikenheten fortsätter att göra framsteg längs kanten av övre Gediz Vallis ås, undersöker den brutna berggrunden i vår arbetsyta och tar bilder av åsavlagringen när rovern kör söderut.
Dagens 2-sol plan fokuserade på en DRT, kontaktvetenskap och körning på den första solen, följt av oriktad fjärranalys på den andra solen. Teamet var tvungen att fatta några beslut i början av planeringen om huruvida de skulle köra på den första eller andra solen i denna plan, och hur det skulle påverka de kommande helgaktiviteterna.
Som det visade sig kunde teamet anpassa alla önskade kontaktvetenskaper och fjärranalysaktiviteter på den första solen, förutom körningen på den första solen, vilket innebär att vi kommer att kunna nedlänka mer information om vår slut. -off-drive plats för att bättre informera planering för helgen. Helgplaner ger möjligheter till mycket bra kontaktvetenskap, så det kommer att vara till stor hjälp att ha ytterligare data nere för planering.
Det betyder att den första solen i denna plan är fulladdad! Planen börjar med en DRT-aktivitet för att exponera en ny yta på berggrundsmålet "Tilden Lake", följt av APXS-integrationer för att undersöka dess sammansättning. Sedan planerade temagruppen Geologi flera timmars fjärranalysaktiviteter, inklusive ChemCam LIBS på berggrundsmålet "Curry Village", som har en liknande "drakskala"-struktur (eller "däckspår") som vi hade observerat i den tidigare arbetsytan .
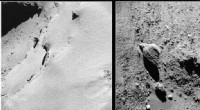
Detta stora fjärravkänningsblock innehåller även ChemCam långdistans RMI-mosaiker för att bedöma stratigrafin vid Gediz Vallis-ryggen och den avlägsna butte Kukenan. Dessa långdistans RMI-bilder avslöjar en hel del detaljer om avlägsna mål, som mångfalden av klasser vid Gediz Vallis ås, som ses i bilden ovan.
Planen inkluderar också ett antal Mastcam-aktiviteter för att karakterisera lokala texturer, sedimentära strukturer, mörka stenar och sandiga eoliska bäddformer (kända som Transverse Aeolian Ridges, aka TARs) i ett närliggande tråg. Temagruppen Miljö planerade också aktiviteter för att övervaka förflyttningen av böter på roverdäcket, söka efter dammjäklar och övervaka atmosfäriskt damm.
Efter detta stora fjärravkänningsblock kommer Curiosity att använda MAHLI för att avbilda kontaktvetenskapsmålet och sedan fortsätta köra söderut. Den andra solen inkluderar oriktade aktiviteter som ett autonomt utvalt ChemCam AEGIS-mål, ytterligare Navcam-däcksövervakning och Navcam-siktlinjeobservationer. Efter körningen kommer vi att ta bilder efter körningen för att förbereda oss för nästa plan.
Tillhandahålls av NASA