Under de senaste åren, med den markanta ökningen av rymdfarkoster, har antalet deorbiterade rymdfarkoster ökat kraftigt, vilket innebär en allvarlig inverkan på både aktiva rymdfarkoster och framtida rymdaktiviteter. Traditionella linnätsfångstsystem, som fungerar som en teknik för att aktivt kretsa i kretslopp för rymdfarkoster, har en enorm potential för att mildra och rensa rymdskräp.
Men repsystem står inför utmaningar som svårigheter att bibehålla formen under längre perioder, känslighet för självtrassling, energiförluster och en minskning av det effektiva fångstområdet. Däremot kan tunna filmer vikas och vecklas ut längs vanliga former, vilket ger större flexibilitet och tillförlitlighet jämfört med tjuder. De framstår som en effektiv lösning på intrasslingsfrågan och presenterar en lovande metod för att lindra och avlägsna rymdskräp.
I en recensionsartikel som nyligen publicerades i Space:Science &Technology , professor Wei Chengs team vid Harbin Institute of Technology, i samarbete med forskare från Beijing Institute of Control Engineering och Benha University, har designat ett system för tunn filmfångst.
Den flexibla strukturen hos detta system är dock utsatt för betydande deformation och vibrationer under rörelse, vilket resulterar i avsevärd interferens med rymdfarkoster. För att kvantitativt analysera dessa störningar fokuserar den här studien på dynamisk modellering och attitydkontroll av tunnfilmsfickfångstsystemet.
Forskningen involverar utvecklingen av en snabb icke-singular terminal glidlägeskontroller (FNTSM) och en observatör för fixerad tidsdilatation (FxESO) integrerade i en attitydspårningskontrolllag. Styrenhetens effektivitet valideras genom upprättandet av en virtuell prototyp. Denna forskning ger teoretiskt stöd för den framtida tillämpningen av systemet i omloppsbana.
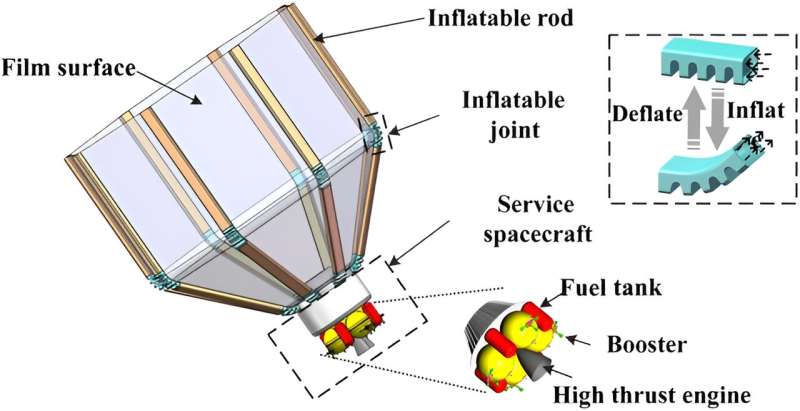
Fastställ först modellen för fångstfickans system. Genom att använda en stor flexibel membranstruktur som stöds av uppblåsbara stavar, bildar den övre delen ett åttakantigt prisma, vilket ger ett stort hölje för fångstmekanismen, medan den nedre delen antar en cylindrisk form.
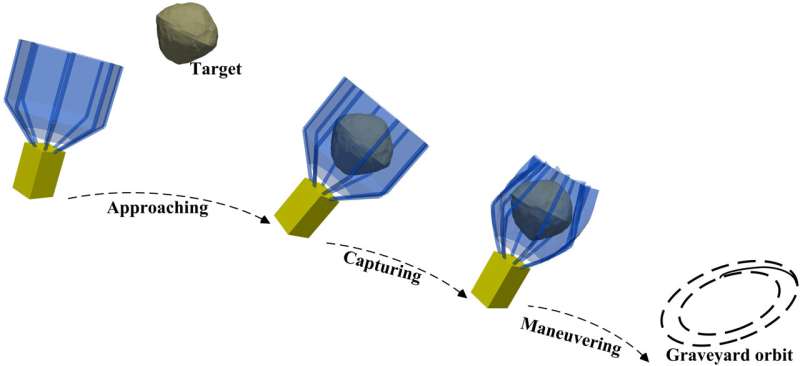
Systemets utlösning och indragning uppnås genom justering av uppblåsning och tömning med hjälp av uppblåsbara flexibla leder. Systemets arbetsprocess är huvudsakligen i 3 steg. Först drivs rymdfarkostsystemet av motorn med hög dragkraft för att närma sig det fångade målet. Sedan blåses uppblåsbara flexibla leder upp för att omsluta målet. Slutligen manövrar tjänstefarkosten aktivt för att dra det fångade målet in i kyrkogårdens omloppsbana.
Använd sedan Absolute Nodal Coordinate Formulering (ANCF) för att etablera den dynamiska modellen för tunnfilmsfickafångstsystemet. Använd högordnings ANCF-element med 8 noder för att beskriva filmytans rörelse, som representerar den globala positionsvektorn genom interpolationspolynom Φi (xi , yi ).
Beskriv töjningen av materialpunkter med Green–Lagrange-töjningstensorn och ersätt den med den globala positionsvektorgradienttensorn J i att härleda elementets rörelseekvationer. Använd principen om virtuellt arbete för att härleda elementets kinematiska ekvationer. Introducera dessutom styrenheten u , vinkelhastighet ω( ω) , och enhet quaternion q .
Härled derivatan av attitydspårningsfelen, inklusive vinkelhastighetsfel ω e och attitydrotationsmatris A qe . Slutligen införlivar effekterna av rymdfarkostens tröghetsmoment J R och externa störningar d , härleda rymdfarkostens attityddynamiska ekvationer.
Därefter har författaren, som bygger på ickelinjär glidlägeskontroll, utformat en FTSM-yta (Fast Terminal Sliding Mode) F . För att förhindra singularitetsproblem i FTSM är en FNTSM-yta (Fast Nonsingular Terminal Sliding Mode) F utformad när |q ei | <ψ .
Införandet av en FxESO (Fixed-Time Extended State Observer) innebär att man utformar de dynamiska ekvationerna för observationsfel, vilket möjliggör uppskattning av osäkerheter. Slutligen, baserat på FTNSM och FxESO, är en rymdfarkostkontroller designad för att uppnå konvergens och stabilitet inom en begränsad tid.
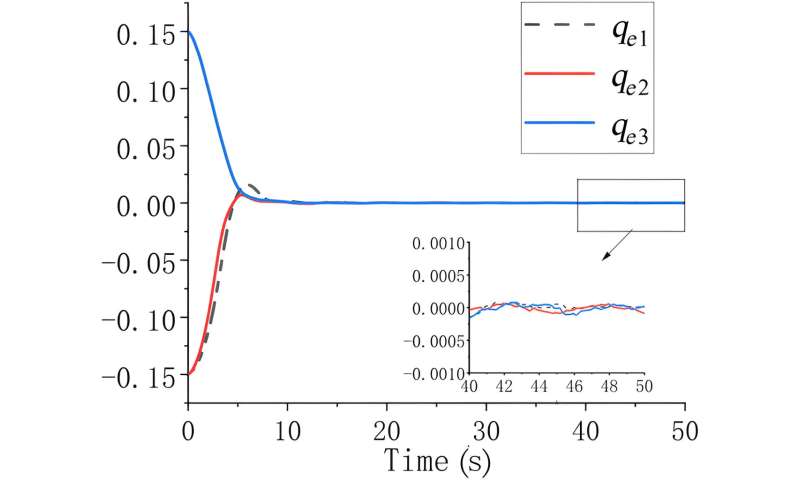
Efter det etablerade författaren en virtuell prototyp och genomförde numeriska simuleringsanalyser av relevant dynamik och styrteorier. Studien avslöjade att systemet gradvis stabiliserades efter rymdfarkosternas attitydmanövrar.
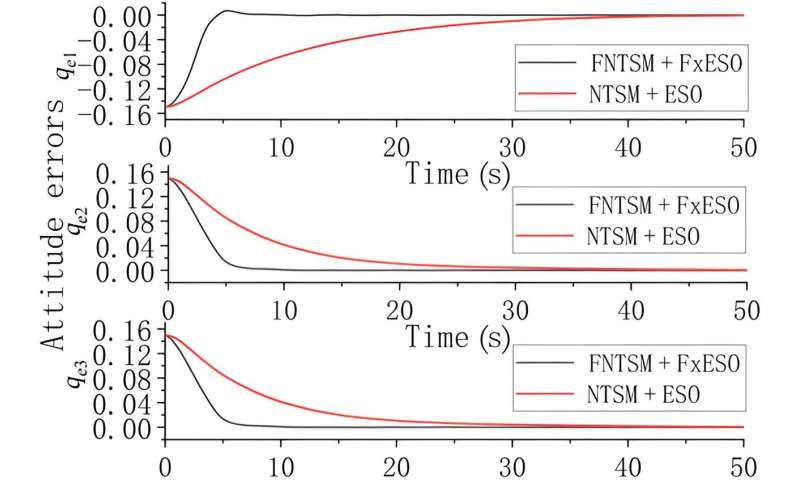
Det fanns dock fortfarande vibrationer i de flexibla stängerna, vilket hindrade membranet från att dras åt helt, vilket resulterade i kontinuerliga rynkor på membranytan. Dessutom jämfördes FNTSM + FxESO-styrenheten med styrenheten Nonsingular Terminal Sliding Mode (NTSM) + Expansion Observer (ESO), och attitydfelen under denna styrenhet analyserades.
Resultaten indikerar att FNTSM + FxESO-styrenheten för rymdfarkosten till önskad attityd efter 10 sekunder, vilket är ungefär 25 sekunder snabbare jämfört med NTSM + ESO-styrenheten. Detta förbättrar avsevärt konvergenshastigheten för systemets attitydfel.
Dessutom kan den här styrenheten effektivt undertrycka vibrationer med hög amplitud och hålla steady-state attitydfelet i storleken 10 -4 . Detta visar den föreslagna styrenhetens höga effektivitet, precision och stabilitet.
Mer information: Zhuoran Huang et al, Dynamics and FNTSM Control of Spacecraft with a Film Capture Pocket System, Space:Science &Technology (2023). DOI:10.34133/space.0079
Tillhandahålls av Beijing Institute of Technology Press Co., Ltd