Kredit:University of Electro Communications
Forskare säger att artificiell intelligens (AI) nu är överlägsen mänsklig intelligens i övervakat lärande med stora mängder märkta data för att utföra specifika uppgifter. Dock, det anses svårt att förverkliga människoliknande intelligens med endast övervakat lärande eftersom alla övervakade etiketter inte kan erhållas för all sensorisk information som krävs av robotar.
Här, Tomoaki Nakamura från UEC, Tokyo, och kollegor forskar om förverkligandet av robotar som kan förvärva kunskap på ett sätt som liknar människor.
För detta ändamål, forskaren anser att det är viktigt för robotar att förstå sin miljö genom att strukturera sin egen sensoriska information på ett oövervakat sätt.
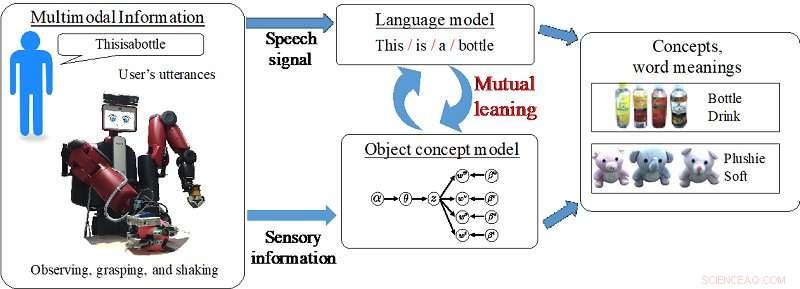
Nyligen, Nakamura föreslog en algoritm som gör det möjligt för robotar att lära sig begrepp och språk. Robotarna hämtar multimodal information från objekt och språklig information genom att kommunicera med andra. Med hjälp av denna information, algoritmen tillåter robotar att bilda objektkoncept och lära sig språk. Dessutom, begrepp som lärs in av robotar som använder denna algoritm jämförs med motsvarande mänskliga koncept och likheterna mellan dem visas.
Nakamura har också föreslagit en metod för robotar att lära sig rörelser genom att observera mänsklig rörelse. Dessutom, denna metod tillåter robotar att lära sig interaktionsreglerna genom att observera mänsklig interaktion.
"Genom denna forskning, Jag skulle vilja utveckla robotar som människor, "säger Nakamura." Dessutom, Jag tror att denna forskning kommer att leda till en bättre förståelse av mänsklig intelligens. "