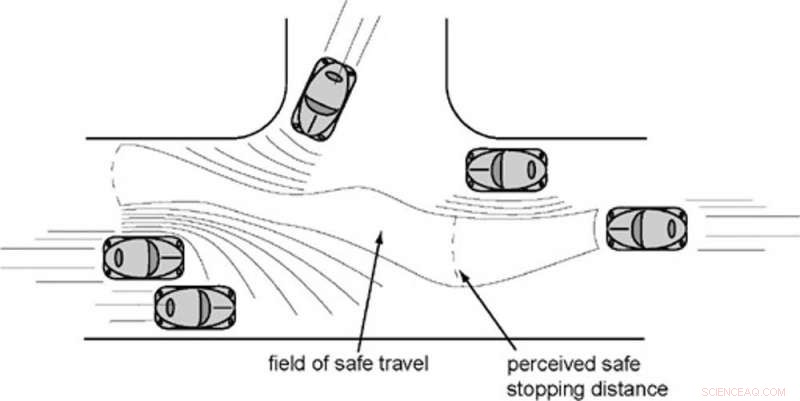
Föraren av bilen till höger bedömer en säker väg genom hinder baserat på deras rörelser och upplevda stoppsträcka. Kredit:Anpassad från Gibson and Crooks av Steven Lehar
1938, när det bara fanns ungefär en tiondel av antalet bilar på amerikanska vägar som det finns idag, en briljant psykolog och en pragmatisk ingenjör gick samman för att skriva ett av de mest inflytelserika verk som någonsin publicerats om bilkörning. En självkörande bils dödande av en fotgängare i Arizona belyser hur deras arbete fortfarande är relevant idag – särskilt när det gäller säkerheten för automatiserade och autonoma fordon.
James Gibson, psykologen i fråga, och ingenjören Laurence Crooks, hans partner, utvärderade en förares kontroll över ett fordon på två sätt. Den första var att mäta vad de kallade "minsta stoppzon, " sträckan det skulle ta att stanna efter att föraren slagit på bromsen. Den andra var att titta på förarens psykologiska uppfattning om de möjliga farorna runt fordonet, som de kallade "fältet för säkra resor". Om någon körde så att alla potentiella faror var utanför räckvidden som behövdes för att stoppa bilen, den personen körde säkert. Osäker körning, å andra sidan, involverade att köra så snabbt eller styra så oregelbundet att bilen inte kunde stanna innan den potentiellt träffade de identifierade farorna.
Dock, detta område för säkra resor är inte samma sak för förarlösa bilar. De uppfattar världen omkring dem med hjälp av laser, radar, GPS och andra sensorer, förutom sina kameror ombord. Så deras uppfattningar kan skilja sig mycket från de som presenteras för mänskliga ögon. På samma gång, deras aktiva svarstider kan vara mycket snabbare – eller ibland till och med överdrivet långsamma, i de fall de kräver mänskligt ingripande.
Jag har skrivit mycket om naturen av mänsklig interaktion med teknik, särskilt när det gäller den kommande vågen av automatiserade bilar. Det är klart för mig att om människor och maskiner endast kör enligt deras respektive – och väsentligt olika – perceptions- och reaktionsförmåga, då blir konflikter och kollisioner nästan oundvikliga. För att dela vägen säkert, varje sida kommer att behöva förstå den andra mycket mer intimt än de gör nu.
Samspel mellan rörelse och utsikt
För mänskliga förare, vision är kung. Men vad förare ser beror på hur de flyttar bilen:Bromsar, acceleration och styrning förändrar bilens position och därmed förarens sikt. Gibson förstod att detta ömsesidiga beroende av uppfattning och handling innebar att när man ställdes inför en speciell situation på vägen, människor förväntar sig att andra ska bete sig på ett specifikt sätt. Till exempel, en person som ser en bil komma fram till en stoppskylt förväntar sig att föraren ska stanna bilen; se dig omkring efter mötande trafik, fotgängare, cyklister och andra hinder; och fortsätt först när kusten är klar.
En stoppskylt finns helt klart för mänskliga förare. Det ger dem en chans att se sig omkring noggrant utan att bli distraherad av andra aspekter av körning, som att styra. Men ett autonomt fordon kan skanna hela sin omgivning på en bråkdel av en sekund. Den behöver inte nödvändigtvis stanna – eller ens sakta ner – för att navigera säkert i korsningen. Men en autonom bil som rullar genom en stoppskylt utan att ens pausa kommer att ses som alarmerande, och till och med farligt, till närliggande människor, eftersom de antar att mänskliga regler fortfarande gäller.
Vad maskiner kan förstå
Här är ett annat exempel:Tänk på bilar som går samman från en sidogata till en trafikerad genomfartsled. Folk vet att ögonkontakt med en annan förare kan vara en effektiv metod för att kommunicera med varandra. I en delad sektion, en förare kan be om tillåtelse att köra in och den andra föraren kan erkänna att ja, hon kommer att ge efter för att ge plats. Hur exakt ska människor ha det här samspelet med en självkörande bil? Det är något som ännu inte har fastställts.
Fotgängare, cyklister, motorcykelförare, bilförare och lastbilschaufförer kan alla förstå vad andra mänskliga förare sannolikt kommer att göra – och att uttrycka sina egna avsikter för en annan person på lämpligt sätt.
Ett automatiserat fordon är en helt annan sak. Den kommer att veta lite eller ingenting om "kan jag?" "ja, OK" typer av informell interaktion som människor engagerar sig i varje dag, och kommer endast att fastna med de specifika regler som den har tillhandahållits. Eftersom få algoritmer kan förstå dessa implicita mänskliga antaganden, de kommer att bete sig annorlunda än vad folk förväntar sig. Vissa av dessa skillnader kan verka subtila – men vissa överträdelser, som att köra stoppskylten, kan orsaka skada eller till och med dödsfall.
Vad mer, förarlösa bilar kan effektivt förblindas om deras olika sensoriska system blockeras, funktionsfel eller tillhandahålla motsägelsefull information. I den dödliga kraschen 2016 av en Tesla i "Autopilot"-läge, till exempel, en del av problemet kan ha varit en konflikt mellan vissa sensorer som kunde ha upptäckt en traktor-släp över vägen och andra som troligen inte gjorde det eftersom den var bakgrundsbelyst eller för högt upp från marken. Dessa misslyckanden kan skilja sig ganska mycket från de brister som människor har kommit att förvänta sig av medmänniskor.
Som med all ny teknik, det kommer att inträffa olyckor och problem – och på vägarna, som nästan oundvikligen kommer att leda till skada och dödsfall. Men den här typen av problem är inte unika för självkörande bilar. Snarare, det är kanske inneboende i alla situationer när människor och automatiserade system delar utrymme.
Denna artikel publicerades ursprungligen på The Conversation. Läs originalartikeln.