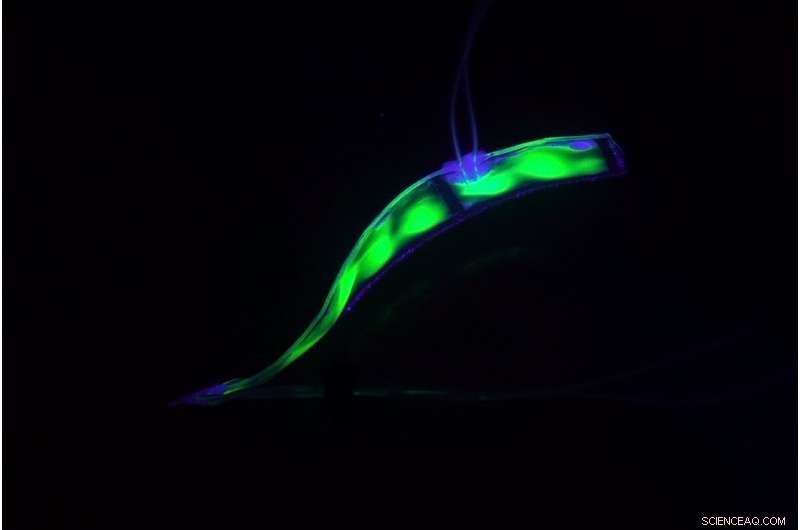
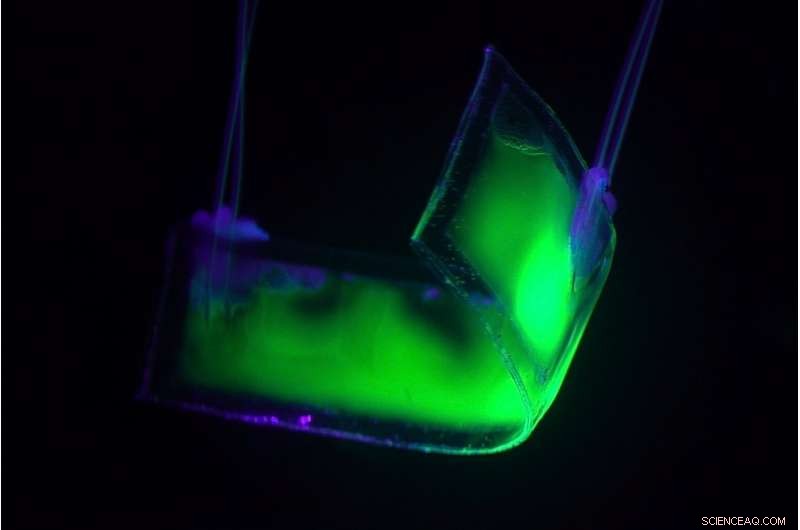
De ledande kamrarna inuti robotens konstgjorda muskler kan laddas med fluorescerande färgämne (som visas i videon som följer med studien och denna release). I framtiden, fluorescensen kan användas som ett slags signalsystem. Upphovsman:University of California San Diego
En innovativ, ålliknande robot utvecklad av ingenjörer och marinbiologer vid University of California kan simma tyst i saltvatten utan elmotor. Istället, roboten använder konstgjorda muskler fyllda med vatten för att driva sig själv. Den fotlånga roboten, som är ansluten till ett elektronikkort som ligger kvar på ytan, är också praktiskt taget transparent.
Laget, som inkluderar forskare från UC San Diego och UC Berkeley, beskriver deras arbete i 25 april -numret av Science Robotics . Forskare säger att boten är ett viktigt steg mot en framtid när mjuka robotar kan simma i havet tillsammans med fisk och ryggradslösa djur utan att störa eller skada dem. I dag, de flesta undervattensfordon som är utformade för att observera marint liv är styva och ubåtsliknande och drivs av elmotorer med bullriga propellrar.
"I stället för propellrar, vår robot använder mjuka konstgjorda muskler för att röra sig som en ål under vattnet utan att göra något ljud, "sa Caleb Christianson, en doktorsexamen student vid Jacobs School of Engineering vid UC San Diego.
En viktig innovation var att använda saltvattnet där roboten simmar för att hjälpa till att generera de elektriska krafter som driver den. Boten är utrustad med kablar som spänner både saltvattnet som omger det och på påsar med vatten inuti dess konstgjorda muskler. Robotens elektronik levererar sedan negativa laddningar i vattnet strax utanför roboten och positiva laddningar inuti roboten som aktiverar musklerna. De elektriska laddningarna gör att musklerna böjer sig, genererar robotens böljande simrörelse. Avgifterna ligger precis utanför robotens yta och har väldigt lite ström så att de är säkra för närliggande marint liv.
"Vårt största genombrott var tanken på att använda miljön som en del av vår design, "sa Michael T. Tolley, tidningens motsvarande författare och professor i maskinteknik vid Jacobs School i UC San Diego. "Det kommer att bli fler steg för att skapa en effektiv, praktisk, obunden ålrobot, men vid denna tidpunkt har vi bevisat att det är möjligt. "
Tidigare, andra forskargrupper hade utvecklat robotar med liknande teknik. Men för att driva dessa robotar, ingenjörer använde material som måste hållas i konstant spänning inuti halvstyva ramar. De Science Robotics studie visar att ramarna inte är nödvändiga.
Istället för propellrar, vår robot använder mjuka konstgjorda muskler för att röra sig som en ål under vattnet utan att göra något ljud. Upphovsman:University of California San Diego
"Detta är på sätt och vis den mjukaste roboten som ska utvecklas för undersökning av undervatten, "Sa Tolley.

Forskare testade roboten i tankar vid Birch Aquarium vid Scripps Institution of Oceanography vid UC San Diego. Upphovsman:University of California San Diego
Roboten testades inuti saltvattentankar fyllda med gelé, korall och fisk vid Birch Aquarium på Scripps Institution of Oceanography vid UC San Diego och i Tolleys lab.
De ledande kamrarna inuti robotens konstgjorda muskler kan laddas med fluorescerande färgämne (som visas i videon som följer med studien och denna release). I framtiden, fluorescensen kan användas som ett slags signalsystem.
Nästa steg inkluderar också att förbättra robotens tillförlitlighet och dess geometri. Forskare behöver förbättra ballast, utrusta roboten med vikter så att den kan dyka djupare. Tills vidare, ingenjörer har improviserade ballastvikter med en rad föremål, som magneter. I framtida arbete, forskare tänker sig att bygga ett huvud för sin ålrobot för att rymma en serie sensorer.