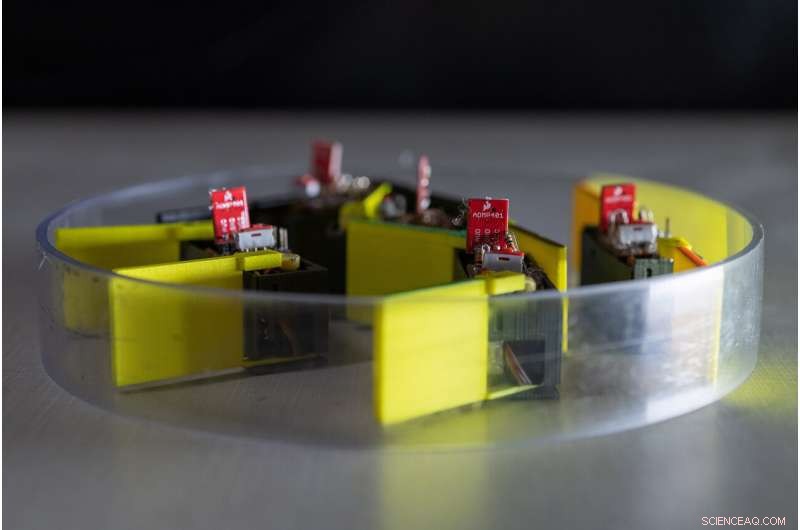
Fem identiska "smarticles" - smarta aktiva partiklar - interagerar med varandra i en inneslutning. Genom att knuffa till varandra, gruppen - kallad "supermarticle" - kan röra sig på slumpmässiga sätt. Kredit:Georgia Tech, Rob Felt
Att bygga konventionella robotar kräver vanligtvis att man noggrant kombinerar komponenter som motorer, batterier, ställdon, kroppssegment, ben och hjul. Nu, forskare har tagit ett nytt tillvägagångssätt, bygga en robot helt från mindre robotar som kallas "smarticles" för att låsa upp principerna för en potentiellt ny förflyttningsteknik.
De 3-D-tryckta smartiklarna-kort för smarta aktiva partiklar-kan bara göra en sak:klappa sina två armar. Men när fem av dessa smartiklar är instängda i en cirkel, de börjar knuffa på varandra, bildar ett robofysiskt system känt som en "supermarticle" som kan röra sig av sig själv. Genom att lägga till en ljus- eller ljudsensor kan supersmarticlen röra sig som svar på stimulansen – och till och med kontrolleras tillräckligt bra för att navigera i en labyrint.
Även om det är rudimentärt nu, idén om att göra robotar av mindre robotar – och dra fördel av gruppkapaciteten som uppstår genom att kombinera individer – skulle kunna ge mekaniskt baserad kontroll över mycket små robotar. I sista hand, det framväxande beteendet hos gruppen kan ge ett nytt förflyttnings- och kontrollsätt för små robotar som potentiellt kan ändra form.
"Det här är mycket rudimentära robotar vars beteende domineras av mekanik och fysiklagar, sa Dan Goldman, Dunn familjeprofessor vid School of Physics vid Georgia Institute of Technology. "Vi vill inte ha sofistikerad kontroll, avkänning och beräkning på dem alla. Allt eftersom robotar blir mindre och mindre, vi måste använda mekanik och fysikprinciper för att kontrollera dem eftersom de inte kommer att ha den nivå av beräkning och avkänning vi skulle behöva för konventionell kontroll."
Forskningen, som stöddes av Army Research Office och National Science Foundation, är planerad att publiceras den 18 september i tidskriften Vetenskapsrobotik . Forskare från Northwestern University bidrog också till projektet.
Grunden för forskningen kom från en osannolik källa:en studie av byggmaterial. Genom att hälla dessa kraftiga häftklamrar i en behållare med avtagbara sidor, tidigare Ph.D. studenten Nick Gravish – nu fakultetsmedlem vid University of California San Diego – skapade strukturer som skulle stå för sig själva efter att containerns väggar tagits bort.
Skakade häftklammertornen fick dem så småningom att kollapsa, men observationerna ledde till en insikt om att enkel intrassling av mekaniska föremål kunde skapa strukturer med kapacitet långt utöver de enskilda komponenternas.
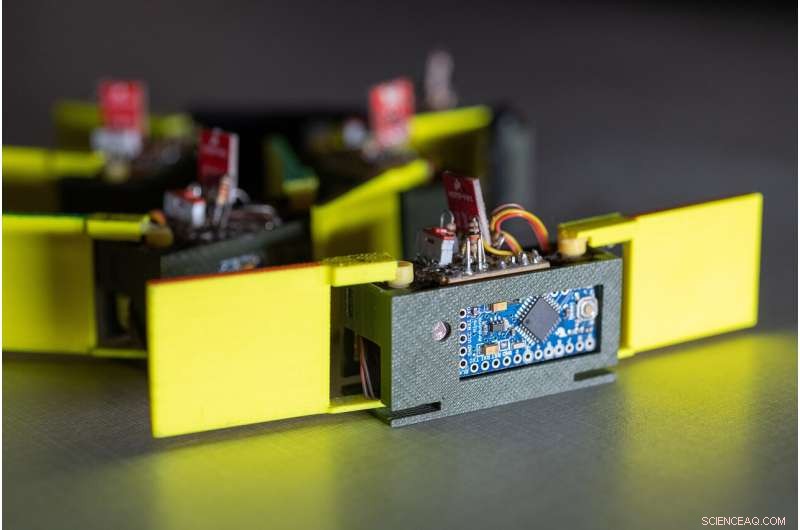
Närbild av en "smarticle" - smart aktiv partikel - som visar de två 3D-printade armarna, ljussensor och motor. Kredit:Georgia Tech, Rob Felt
"En robot gjord av andra rudimentära robotar blev visionen, "Goldman sa." Du kan tänka dig att göra en robot där du skulle justera dess geometriska parametrar lite och det som framkommer är kvalitativt nya beteenden. "
För att utforska konceptet, doktorandforskaren Will Savoie använde en 3-D-skrivare för att skapa batteridrivna smartiklar, som har motorer, enkla sensorer och begränsad datorkraft. Enheterna kan bara ändra sin plats när de interagerar med varandra när de är omslutna av en ring.
"Även om ingen enskild robot kunde röra sig på egen hand, molnet som består av flera robotar kunde röra sig när det tryckte sig isär och krympa när det drog sig samman, "Förklarade Goldman." Om du lägger en ring runt molnet av små robotar, de börjar sparka runt varandra och den större ringen – vad vi kallar en supersmarticle – rör sig slumpmässigt."
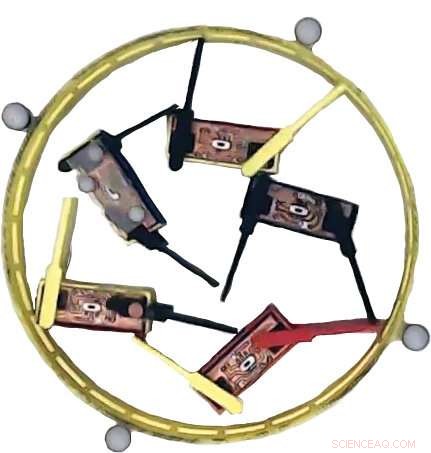
En supersartikel. Kredit:Savoie et al., Sci. Robot. 4, eaax4316 (2019)
Forskarna märkte att om en liten robot slutade röra sig, kanske för att batteriet tog slut, gruppen av smarticles skulle börja röra sig i riktning mot den avstannade roboten. Doktorand Ross Warkentin lärde sig att kunna kontrollera rörelsen genom att lägga till fotosensorer till robotarna som stoppar armens flaxande när en stark ljusstråle träffar en av dem.
"Om du vinklar ficklampan rätt, du kan markera roboten du vill vara inaktiv, och som får ringen att slingra sig mot eller bort från den, även om inga robotar är programmerade att röra sig mot ljuset, ", sa Goldman. "Det gjorde det möjligt att styra ensemblen på ett mycket rudimentärt sätt, stokastiskt sätt."
School of Physics Professor Kurt Wiesenfeld och doktorand Zack Jackson modellerade rörelsen av dessa smarticles och supersmarticles för att förstå hur knuffarna och massan av ringen påverkade den totala rörelsen. Forskare från Northwestern University studerade hur interaktionerna mellan smartiklarna gav riktningskontroll.
"For many robots, we have electrical current move motors that generate forces on parts that collectively move a robot reliably, " said Todd Murphey, a professor of mechanical engineering who worked with Northwestern graduate students Thomas Berrueta and Ana Pervan. "We learned that although individual smarticles interact with each other through a chaos of wiggling impacts that are each unpredictable, the whole robot composed of those smarticles moves predictably and in a way that we can exploit in software."
I framtida arbete, Goldman envisions more complex interactions that utilize the simple sensing and movement capabilities of the smarticles. "People have been interested in making a certain kind of swarm robots that are composed of other robots, " he said. "These structures could be reconfigured on demand to meet specific needs by tweaking their geometry."
The project is of interest to the U.S. Army because it could lead to new robotic systems capable of changing their shapes, modalities and functions, said Sam Stanton, program manager, complex dynamics and systems at the Army Research Office, an element of U.S. Army Combat Capabilities Development Command's Army Research Laboratory.
"Future Army unmanned systems and networks of systems are imagined to be capable of transforming their shape, modality and function. Till exempel, a robotic swarm may someday be capable of moving to a river and then autonomously forming a structure to span the gap, " he said. "Dan Goldman's research is identifying physical principles that may prove essential for engineering emergent behavior in future robot collectives as well as new understanding of fundamental trade-offs in system performance, responsiveness, uncertainty, resiliency and adaptivity."