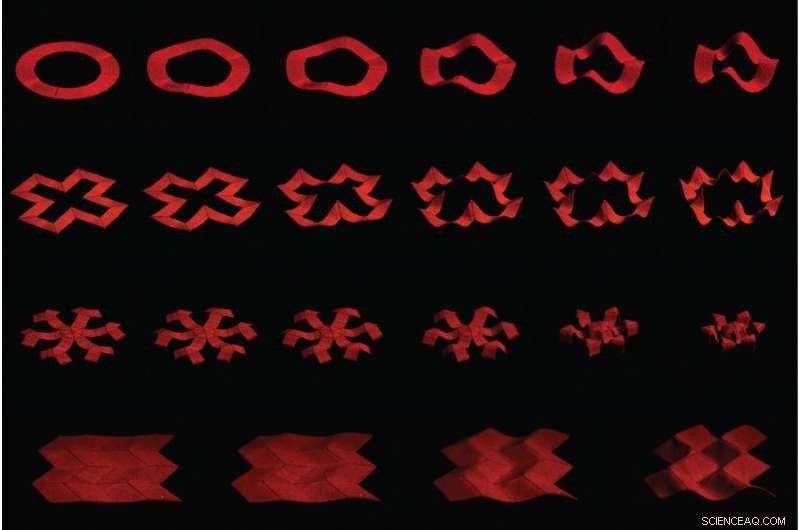
Time-lapse foto för olika design av utvecklat magnetiskt aktivt material. Kredit:MIT Soft Active Materials Lab
Nya 3-D-tryckta robotstrukturer kan klämmas in i trånga utrymmen som en spricka i väggen i en grotta, hoppa över snubbeltråd eller kryp under ett fordon – alla komplexa armérelevanta funktioner som är omöjliga för människor att utföra säkert.
Utredare vid Army's Institute for Soldier Nanotechnologies (ISN), ligger på MIT, har utvecklat en 3D-utskriftsplattform som kan möjliggöra både modellering och design av komplexa magnetiskt aktiverade enheter. Det nya tillvägagångssättet använder en 3D-utskriftsplattform utrustad med ett elektromagnetmunstycke och en ny typ av 3D-utskrivbart bläck infunderat med magnetiska partiklar. Deras resultat kan leda till nya biomedicinska tillämpningar, magnetiskt bläck optimerat för att stärka mjuk robotfunktionalitet, och nya flexibla materialsystem på begäran för integration i soldatsystem.
Mjuk robotkapacitet och tillverkning vid behov är bland arméns främsta forskningsprioriteringar.
Denna forskning sköts genom U.S. Army Research Laboratorys Army Research Office av Dr. Aura Gimm.
"Denna forskning gav ny insikt om sätt att orsaka snabba förändringar i 3-dimensionella former av delar som robotens lemmar. MIT-gruppen visade denna framgång med hjälp av auxetic metamaterial - syntetiska kompositmaterial som har en ovanlig inre struktur och den ovanliga egenskapen som när de exponeras extern magnetisk aktivering, de krympte i både längsgående och tvärgående riktningar. Detta skiljer sig från typiska auxetiska material som kräver direkt mekanisk kontakt, och när de komprimeras genomgår de sammandragning i riktningarna vinkelräta mot den applicerade kraften (detta kallas det negativa Poissons förhållande). Tvärtom, vanliga material expanderar i riktningarna ortogonalt mot tryckbelastning. I ett exempel från denna forskning, genom magnetisk fjärrkontroll, de fick en metamaterialstruktur att hoppa framåt 120 mm inom 0,7 s, vilket är mycket snabbt för den nuvarande teknikens ståndpunkt. Detta hopp berodde på en snabb frisättning av elastisk och magnetisk potentiell energi lagrad i den strukturen. Sådana komplexa formformande strukturer kan ha stor potential för armén, eftersom de kan hjälpa till att skapa mjuka robotar – robotar med böjliga lemmar som liknar naturliga organismer. Jämfört med den nuvarande generationen av stela robotar, mjuka robotar kunde röra sig mycket mer skickligt på en komplex slagfältsterräng, " sa Army Research Laboratory Dr Alex Hsieh.
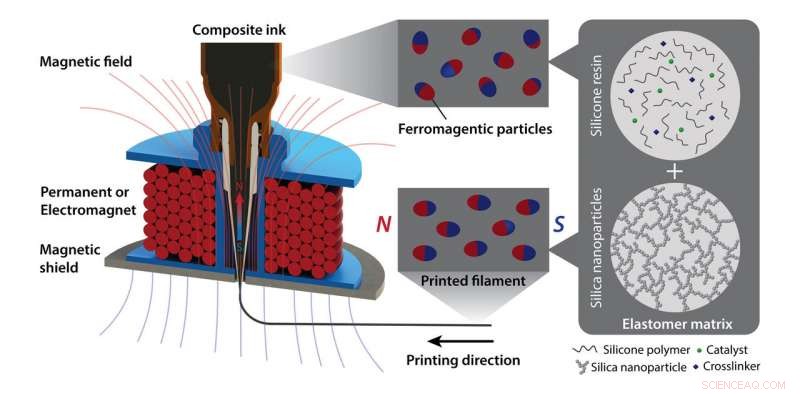
Schemat för tryckprocessen och materialsammansättningen. De ferromagnetiska partiklarna inbäddade i kompositbläcket omorienteras av det applicerade magnetfältet före tryckning. Kredit:US Army
Denna teknik kan göra det möjligt för den framtida armén att tillverka magnetiska 3D-tryckta strukturer som kan krypa, rulla, hoppa eller greppa för att stödja arméns relevanta behov. Denna forskningsinsats gör det möjligt att kontrollera den magnetiska orienteringen av nyligen 3D-utskrivna enheter så att de snabbt kan förändras till nya invecklade formationer eller röra sig när olika sektioner svarar på ett externt magnetfält. Funktioner som demonstreras från dessa komplexa formförändringar inkluderar omkonfigurerbar mjuk elektronik, mekaniskt metamaterial som kan hoppa och en mjuk robot som kan krypa, rulla, fånga snabbt rörliga föremål eller leverera läkemedel.
Även om andra grupper har tillverkat magnetiskt aktiverade material för att utföra enkla rörelser, detta nya tillvägagångssätt möjliggör både modellering och design av magnetiskt styrda enhetssektioner för att utföra komplexa armérelevanta mjuka robotuppgifter.
Tillvägagångssättet är baserat på direkt bläckskrivning av en elastomerkomposit som innehåller ferromagnetiska mikropartiklar och applicering av ett magnetiskt fält på dispenseringsmunstycket under utskrift. Tekniken omorienterar partiklar längs det applicerade fältet för att ge mönstrad magnetisk polaritet till tryckta filament. Denna metod gör det möjligt för forskarna att programmera ferromagnetiska domäner i komplexa 3-D-tryckta mjuka material för att möjliggöra en uppsättning tidigare otillgängliga transformationssätt. Aktiveringshastigheten och effekttätheten för de tryckta mjuka materialen med programmerade ferromagnetiska domäner är storleksordningar större än befintliga 3-D-tryckta aktiva material.
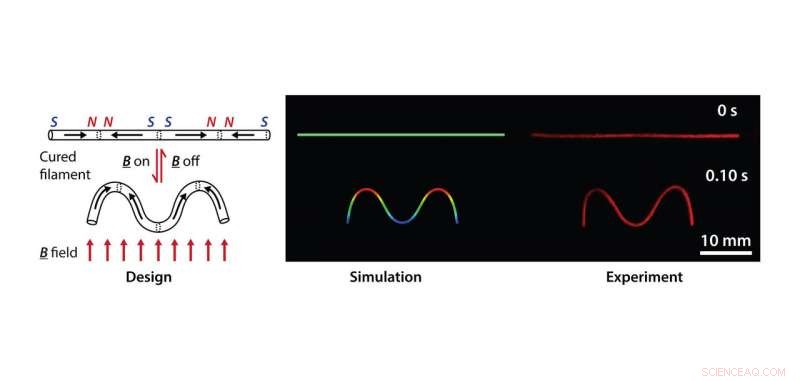
Simulering av den finita elementmodellen och experimentella (i rött) resultat av en enda fiber kodad med alternerande magnetiska domäner utformade för att bilda en "m"-form. Kredit:MIT
"Vi har utvecklat en utskriftsplattform och en prediktiv modell för andra att använda. Människor kan designa sin egen struktur och domänmönster, validera dem med modellen, och skriv ut dem för att aktivera olika funktioner. Genom att programmera komplex information om struktur, domän, och magnetfält, man kan till och med skriva ut intelligenta maskiner som robotar, " sa MIT professor Xuanhe Zhao, en utredare vid arméns ISN.