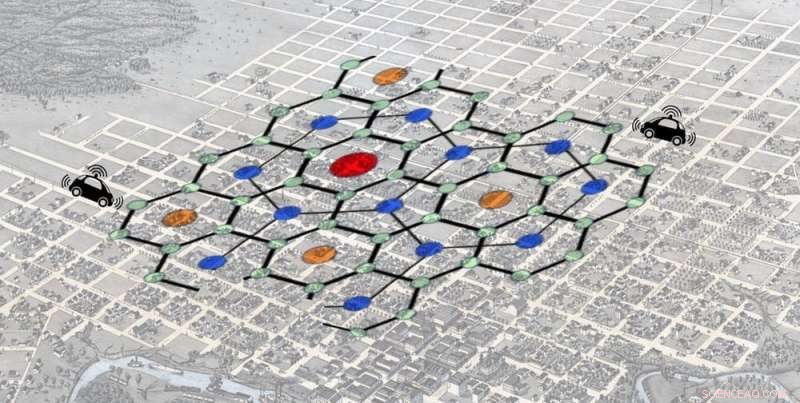
Schematisk representation som visar begränsad tillgång för fordon till utsedda stadskorridorer och noder. Författare tillhandahålls
Autonom, eller förarlös, fordon kan stödja och främja aktivt resande, som att gå och cykla, när två grundläggande villkor är uppfyllda:
I avsaknad av dessa två villkor, autonoma fordon kan leda till en minskning av det aktiva resandet i städer och en ökning av ekonomiska, sociala och miljömässiga kostnader. Potentiella kostnader nämns sällan i retoriken om autonoma fordon, varav mycket är mycket optimistiskt.
Dock, universell eller utbredd tillgång till staden med autonoma fordon kan resultera i skadliga resultat. Inte minst av dessa effekter är på aktivt resande och folkhälsan. Beroende på de förhållanden under vilka autonoma fordon tillåts köra i staden, vi kan förvänta oss en rad effekter med direkta eller indirekta konsekvenser för promenader och cykling.
Hur kan dessa fordon ha skadliga effekter?
För närvarande, tillgång till eller från hållplatser för kollektivtrafiken innebär vanligtvis en kort promenad eller cykeltur för många. I framtiden, vissa människor kanske väljer att använda autonoma fordon för att nå bussen, tåg- eller spårvagnshållplats istället för att gå eller cykla. Eller de kanske väljer att flytta bort från kollektivtrafiken och byta till autonoma fordon helt. Klart, båda situationerna skulle minska aktivt resande.

Effekter av olika nivåer av fordonstillgång och ägande. Kredit:Diagram av Dominic Stead
För närvarande, de flesta går i eller ur sina bilar på parkeringsplatser. I framtiden, autonoma fordon kan leverera passagerare till sina destinationer utan att behöva parkera där. Efter avlämning, autonoma fordon tar sig själva till en annan del av staden där parkering är billig eller gratis. Eller så kan de fortsätta att hämta någon annan.
En möjlig konsekvens är att befintlig väginfrastruktur – körbana eller parkeringsplats – kommer att omdisponeras för avlämning och upphämtning av passagerare. Detta skulle lämna lite eller inget extra utrymme för fotgängare och cyklister.
Även om autonoma fordon kan öka trafiksäkerheten, de kan separeras från andra trafikanter för att minska störningar (avsiktliga eller på annat sätt) och öka förutsägbarheten i det autonoma fordonsflödet.
Segregering av transportsätt skulle innebära att fotgängare eller cyklister endast får korsa körfält för autonoma fordon på specifika punkter, antingen via signalerade korsningar eller broar och tunnlar. Detta kommer att minska tillgängligheten för fotgängare eller cyklister. En stadsstruktur ska skapas som är mindre "permeabel" för aktiva transporter, med rutter som är mindre direkta än de skulle kunna vara.
I sista hand, genom att erbjuda möjligheter till rekreation, arbeta eller till och med sova under bilresor (istället för att köra bil), autonoma fordon kan öka restiden och avståndet som människor anser vara acceptabla. Frekvensen av bilresor kan också öka. Och, eftersom fordon tillbringar längre tid på vägen, kraven på väginfrastrukturkapacitet kan också öka.
På längre sikt, om folk är villiga att resa längre, hem och jobb kan flyttas. Detta skulle underblåsa stadsutbredning och minska lönsamheten för kollektivtrafiken. Lägre kollektivtrafikanvändning kommer att vara skadligt för aktivt resande och folkhälsan.
Begränsa tillgången för välbefinnande i städerna
Att övervinna de negativa konsekvenserna av autonoma fordon kräver först och främst starka restriktioner för deras tillgänglighet inom staden. Detta borde vara mycket mer begränsat än vad det är för konventionella bilar. Tillgången bör begränsas till specifika noder och axlar i staden.
Undantag skulle gälla för vissa användare och situationer. Exempel inkluderar passagerare med funktionshinder, akuttjänster, konstruktion och underhåll, och leveranser av tungt gods.
Den underliggande logiken borde vara att kanalisera autonom fordonstrafik längs ett begränsat antal korridorer i staden, och att lokalisera upphämtnings- och avlämningspunkter vid nyckelnoder längs dessa korridorer. Dessa noder bör vara väl betjänade av högfrekventa kollektivtrafiktjänster. De ska också vara väl kopplade till ett tätt nätverk av attraktiv gång- och cykelinfrastruktur.
Syftet är att främja snabba och effektiva nod-till-nod-resor, som på bilden nedan, snarare än resor från dörr till dörr. Noder bör fördelas runt staden enligt en hierarki.
Att lokalisera mindre noder runt en kilometer från varandra skulle innebära att det maximala avståndet för att nå närmaste nod är 500 meter. Detta anses generellt vara ett acceptabelt gångavstånd i transitorienterad utveckling.
Stora noder kan placeras flera kilometer från varandra. Dessa fungerar som multimodala transitcenter som tillhandahåller förbindelser till tåg- och/eller busstjänster.
Att begränsa framkomligheten till vissa gator i staden ger utrymme som nästan uteslutande kan användas för aktiva transporter.
En framtid där autonomt fordonsägande slås samman kommer att ha mer ekonomisk, sociala och miljömässiga fördelar för städer. Poolning av fordon kommer klart att minska antalet fordon som behövs för att betjäna staden. Detta kommer i sin tur att innebära att mindre infrastruktur behövs för att ta emot dem.
Dock, även om autonoma fordon är individuellt ägda, Att kontrollera tillgången till utvalda noder och axlar i staden kan fortfarande ha fördelar för staden och dess invånare.
Australiska städer måste vara förberedda för utbredd användning av autonoma fordon innan det händer. I detta ingår att vara förberedd för mer aktiva transporter. För närvarande är Australien inte lika redo som många länder i Europa och Nordamerika. Beredskap kräver mer forskning, planering och förberedelser snart.
Den här artikeln är återpublicerad från The Conversation under en Creative Commons-licens. Läs originalartikeln.