Ben fästa på en av forskarnas hexapoder. Kredit:Collins et al.
Forskare vid CSIRO &Queensland University of Technology har nyligen genomfört en studie som syftar till att automatiskt utveckla robotarnas fysiska struktur för att förbättra deras prestanda i olika miljöer. Det här projektet, finansierad av CSIRO:s Active Integrated Matter Future Science Platform, skapades av David Howard, forskare vid Data61:s Robotics and Autonomous Systems Group (RASG).
"RASG fokuserar på fältrobotik, vilket innebär att vi behöver våra robotar för att gå ut på avlägsna platser och utföra uppdrag i svåra, svåra miljöförhållanden, " David Howard berättade för TechXplore. "Undersökningen kom till genom en identifierad möjlighet, eftersom RASG i stor utsträckning använder 3D-utskrift för att bygga och anpassa våra robotar. Denna forskning visar en designalgoritm som automatiskt kan generera 3D-utskrivbara komponenter så att våra robotar är bättre rustade att fungera i olika miljöer."
Studiens huvudsyfte var att generera komponenter automatiskt som kan förbättra en robots miljöspecifika prestanda, med minimala begränsningar för hur dessa komponenter ser ut. Forskarna fokuserade särskilt på benen på en hexapod (6-bent) robot, som kan användas i en mängd olika miljöer, inklusive industriella miljöer, regnskogar, och stränder.
"Benen kan lätt konverteras till 3D-utskrivbara filer, så att vi enkelt kan skriva ut benen och fästa dem på våra hexapods för utplacering, ", sa Howard. "Vi antog att en förändring av benens form skulle ge oss olika prestanda och tidningen beskriver en tidig demonstration av denna förmåga. Vi tog inspiration från den mäktigaste kreativa kraften på planeten, en som om och om igen skapar former som fungerar under ibland mycket svåra miljöförhållanden:evolution. "
Ett ben optimerat för hårda jordytor. Kredit:Collins et al.
Systemet som utvecklats av Howard och hans kollegor använder en genetisk algoritm för att optimera samlingar av Bezier-splines (3-D-versioner av "curve"-verktyget på Microsoft Paint), definiera formen på robotens skenben. Kandidatbendesign är optimerad baserat på hur passform de är för en viss miljö. I sin studie, denna optimering baserades på en funktion av energin som krävdes för att gå genom en miljö och mängden material som krävdes för att skapa benet.
"Vi börjar med en population av slumpmässiga ben, utvärdera dem i en högfientlig simulerad miljö (grus, hård jord och vatten var de vi fokuserade på) och få deras konditionspoäng, Howard förklarade. "Dessa poäng används för att implementera en "survival of the fittest" urvalsprocess, så att goda ben hålls och dåliga ben 'dödas'. De goda benen får då en chans att fortplanta sig, med analoger av crossover, där ett barnben har drag av två föräldraben, och genom mutation, där funktionerna i formerna modifieras slumpmässigt."
Detta tillvägagångssätt gör det möjligt för algoritmen att söka efter bra former att applicera på robotens ben, inom ett utrymme av möjliga lösningar. Forskarna genererade ett antal barnben och lät dem sedan "tävla" med föräldraben för att avgöra vilken som skulle inkluderas i nästa generations omgång. Formen på robotens ben optimerades automatiskt över tiden, efter hundratals sådana generationer.
Ett ben optimerat för grusytor. Kredit:Collins et al.
"Vi kunde visa miljöspecialisering i populationerna av ben, " sa Howard. "De utvecklades automatiskt så att till exempel, större fotspår sågs konsekvent i ben som utvecklats för att gå i grus, eftersom detta hindrar benet att glida ner i gruset och antingen fastnar, eller förbrukar överdriven energi för att ta bort benet. I hård jord, å andra sidan, benen blev tunnare eftersom det inte fanns någon straff för att ha ett mindre fotavtryck. "
Forskarna fann att benen som producerades verkligen var "nischade, 'i evolutionär mening. Med andra ord, formen på benen varierade mycket, eftersom de hade utvecklats till att fungera bäst i olika miljöer.
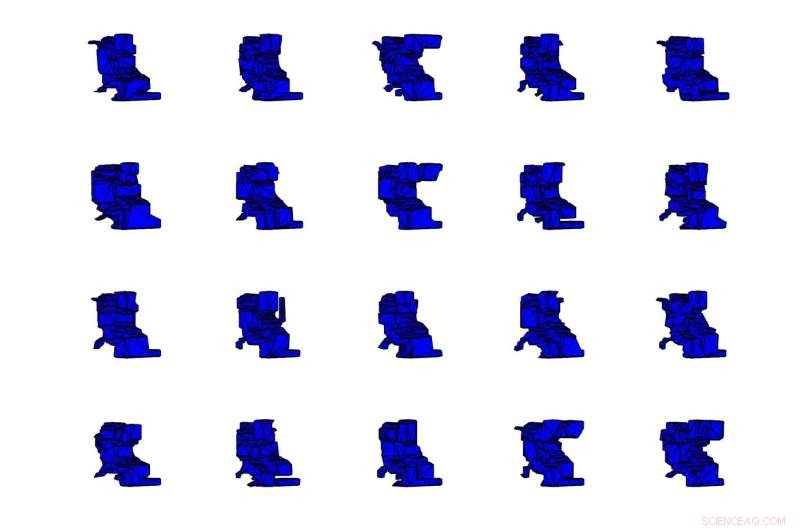
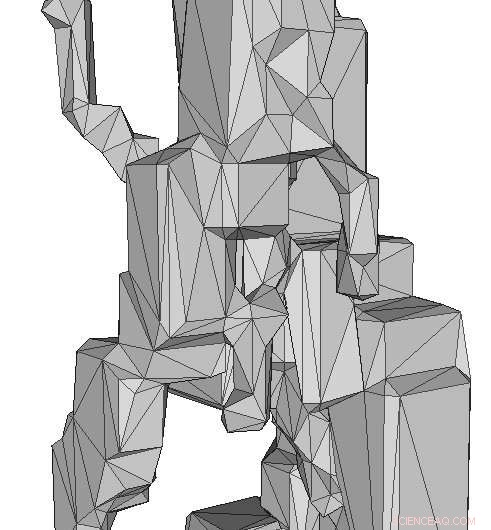
Bilden visar vad som händer när vi muterar ett ben -notera att de alla är lite olika. Detta beror på den 'genetiska' mutationen vi gör på Bezier -kurvorna. Vissa av dessa variationer kommer att vara fördelaktiga och vissa kommer att vara skadliga, eftersom vi väljer baserat på kondition kommer de mer fördelaktiga mutationerna sannolikt att bevaras. Kredit:Collins et al.
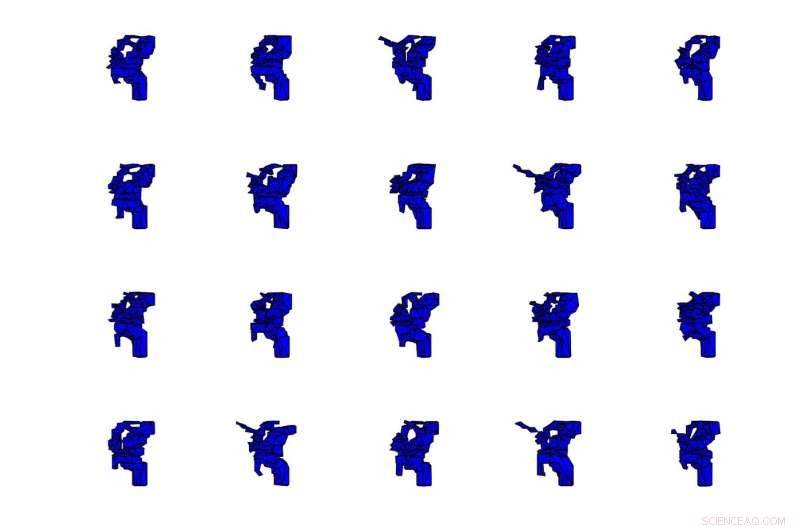
Bilden visar vad som händer när vi muterar ett ben -observera att de alla är lite olika. Detta beror på den "genetiska" mutationen vi gör på Bezier-kurvorna. Vissa av dessa variationer kommer att vara fördelaktiga och vissa kommer att vara skadliga, eftersom vi väljer baserat på kondition kommer de mer fördelaktiga mutationerna sannolikt att bevaras. Upphovsman:Collins et al.
"Prestandamässigt, för, ett optimalt ben för en miljö var inte lika optimalt i andra miljöer, Howard sa. "Detta är viktigt eftersom det visar att vår algoritm skapar miljöspecifika former."
Studien utförd av Howard och hans kollegor kan vara ett viktigt första steg mot utvecklingen av robotar som är bäst utrustade för att fungera i olika miljöer. Än så länge, de har bara utvärderat genererade ben i simuleringar. Innan de kan distribueras, därför, forskarna kommer att behöva testa sina konstruktioner i den verkliga världen och bevisa att de presterar bättre än konventionella ben.

Ben fästa vid en av forskarnas hexapoder. Kredit:Collins et al.
"Vi vill också överväga att använda evolution för att välja olika materialtyper i benen, " sa Howard. "Vi kan använda multi-material 3-D-utskrift för att skapa ben gjorda med olika typer av material, vilket vi förväntar oss kommer att ytterligare förbättra benens förmåga att fungera bra i olika miljöer. Vi har också börjat använda mer komplexa representationer för benformerna, I detta fall, neurala nätverk som kallas sammansättningsmönsterproducerande nätverk, som kan specificera formen och materialegenskaperna för benen utan att vara begränsad till Bezier-liknande geometrier."
© 2018 Tech Xplore