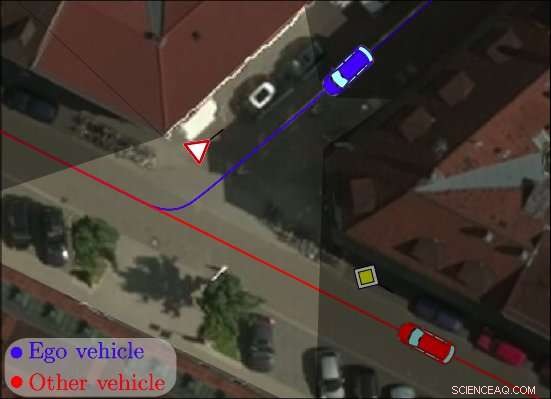
Ett exemplariskt skärningsscenario som belyser ett användningsfall av den föreslagna metoden. Egofordonet, avbildad i blått i hela denna tidning, fortsätter till en korsning där den måste vika sig för. Fordonet har begränsad sikt och ett korsande fordon närmar sig från det ockluderade området. Planeraren av fordonet måste tänka på att det kan vara ett fordon som närmar sig och sänka hastigheten tillräckligt. Kredit:Tas &Stiller.
Forskare vid FZI Research Centre for Information Technology har utvecklat en ny metod som kan förbättra rörelseplaneringen av autonoma fordon i osäkra miljöer eller under förhållanden med begränsad sikt. Deras papper, förpublicerad på arXiv, beskriver en teknik för att undvika kollisioner i värsta tänkbara utvecklingen av ett givet scenario.
"Automatisk körning i stadsmiljöer och under tuffa förhållanden är både utmanande och förblir på topp i forskningen, " skrev forskarna i sin uppsats. "Osvåra väder- och ljusförhållanden resulterar i dålig kvalitet i uppfattningen genom att introducera högre osäkerheter och begränsade mottagliga fält."
De utmaningar som forskarna beskriver är kanske av ännu större relevans i stadsmiljöer, där oväntade händelser gör det svårare att förutse utgången av en situation. För att komma till rätta med dessa svårigheter, Tidigare studier har försökt utveckla banbrytande uppfattningssystem för automatiserade fordon.
Ändå, även de mest avancerade av dessa system, utrustad med toppmoderna sensorer och teknik, kämpar ofta för att hantera osäkerhet, minskar alltså bara risken för kollisioner. För att lösa detta problem, forskarna vid FZI fokuserade på rörelseplanering i en osäker miljö med ocklusioner.
"I den här artikeln analyserade vi osäkerheter som ett automatiserat fordon är föremål för, " förklarade forskarna. "Vi studerade olika utmanande trafiksituationer för ett fordon med ett begränsat mottagligt fält."
Efter att ha studerat de förhållanden under vilka en rörelseplanerare behöver överväga fordon som närmar sig från regioner som inte är synliga, forskarna utarbetade ett tillvägagångssätt för att snabbt upptäcka icke-kompatibla beteenden. Deras tillvägagångssätt imiterar något sättet på vilket mänskliga förare vanligtvis närmar sig korsningar, köra med mer försiktighet och i reducerad hastighet.
"Vi presenterar en metod för att förbli kollisionsfri för den värsta tänkbara utvecklingen av den givna scenen, " skrev forskarna. "Vi definierar kriterier som mäter tillgängliga marginaler till en kollision samtidigt som vi tar hänsyn till synlighet och interaktioner och integrerar följaktligen villkor som tillämpar dessa kriterier i en optimeringsbaserad rörelseplanerare."
Forskarna utvärderade sin metod i en simuleringsmiljö med slutna kretsar och fann att den generaliserade väl över flera olika stadsscenarier. Deras tillvägagångssätt har nu integrerats i ett automatiserat fordon, kallas BERTHAONE.
"Vårt framtida arbete kommer att handla om mer komplexa scenarier, där en mängd rutter och manöveralternativ såsom filbyten är tillgängliga, " skrev forskarna.
© 2018 Science X Network