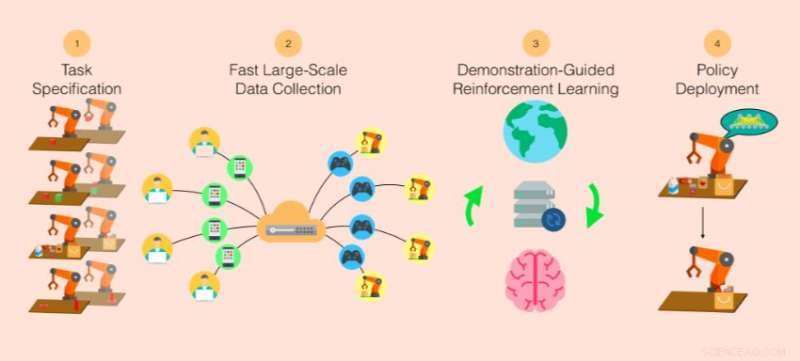
Systemöversikt över ROBOTURK. ROBOTURK möjliggör snabb imitation guidad färdighetsinlärning. Detta system består av följande stora steg:1) att ange en uppgift, 2) samla en stor uppsättning uppgiftsdemonstrationer med ROBOTURK, 3) att använda demonstrationsförstärkt förstärkningslärande för att lära sig en policy, och 4) att använda den inlärda färdigheten inom intresseområdet. Upphovsman:Mandlekar et al.
Imiterat lärande är en gren av maskininlärning som tränar maskiner för att efterlikna mänskligt beteende samtidigt som de utför specifika uppgifter. Dessa tekniker visar stort löfte inom robotik, när de tar itu med några av bristerna i förstärkningslärande, såsom prospektering och belöningsspecifikation.
Trots uppmuntrande resultat, imiteringsstudier har hittills begränsats till måttliga datamängder på grund av svårigheter att samla in stora mängder uppgiftsdemonstrationer med hjälp av befintliga metoder. För att hantera dessa begränsningar, ett team av forskare som övervakas av Dr Silvio Savarese och Dr. Fei-Fei Li vid Stanford University har utvecklat RoboTurk, en crowdsourcingplattform för högkvalitativ 6-DoF-banbaserad teleoperation med allmänt tillgängliga smarttelefonenheter.
"Vi ville skapa något som ImageNet for Robotics, "Ajay Mandlekar, en av forskarna som genomförde studien, berättade TechXplore. "Vi tror att data är en nyckelbegränsning inom robotinlärning. Även om det finns många metoder som lär sig av data, såsom datadriven kontroll och förstärkningslärande, de flesta metoder samlar in sin egen data. Som ett resultat, data är ofta av låg kvalitet, till exempel resulterar i att roboten rör armen slumpmässigt. Denna typ av prospektering kan vara svår och osäker, men vi tror att människor kan hjälpa. "
ImageNet är en känd bilddatabas skapad av Dr. Li, vanligt förekommande inom datorsyn och objektigenkänningsforskning. Crowdsourcing -plattformen som utvecklats av Stanford Vision and Learning Lab var utformad för att fungera som en liknande resurs för studier av robotik och imitation.
"Till skillnad från ImageNet, ett sådant datainsamlingssystem måste vara dynamiskt, tillåter oss att samla in data upprepade gånger, ofta på begäran, och kanske till och med använda samarbetsinlärning, "Yuke Zhu, som också var involverad i utvecklingen av Roboturk, berättade TechXplore. "Detta beror på att data som samlas in beror på vilka typer av åtgärder roboten vidtar i miljön."
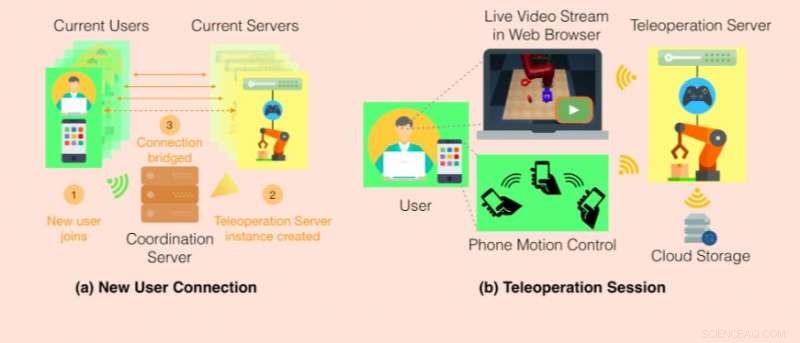
Systemdiagram över ROBOTURK. En ny användare ansluter till en webbplats för att ansluta sig till systemet, och en koordinationsserver lanserar en dedikerad teleoperationsserver för användaren, som visas i (a). Koordineringsservern etablerar sedan direkta kommunikationskanaler mellan användarens webbläsare och iPhone och teleoperationsservern för att starta teleoperationssessionen. Användaren styr den simulerade roboten genom att flytta sin telefon, och får en videoström som feedback i sin webbläsare, som visas i (b). Efter varje lyckad demonstration, teleoperationsservern driver den insamlade data till ett molnlagringssystem. Upphovsman:Mandlekar et al.
Forskarnas yttersta mål är att träna robotar i avancerade manipulationskunskaper, så att de kan slutföra uppgifter inom industriella miljöer som förpackningar eller montering. De fann att även om imitation lärande visade stor potential i detta sammanhang, befintliga datamängder var mycket begränsade på grund av svårigheter att samla in stora mängder uppgiftsdemonstrationer.
"På andra områden som datorsyn och bearbetning av naturligt språk, storskalig övervakning av datamängder samlas ofta in med hjälp av crowdsourcing, "Mandlekar sa." Detta möjliggör en skalbar mekanism för mångsidig mänsklig övervakning på en omfattande uppsättning probleminstanser. Dock, att samla in stora mängder data har varit en utmaning för robotuppgifter, eftersom de kräver interaktion i realtid och feedback från annotatorer, ställa svåra begränsningar på fjärroperationer. "
Gruppen på Stanford Vision and Learning Lab utvecklade därför RoboTurk, en crowdsourcingplattform som gör det möjligt för forskare att skala upp de färdigheter och uppgifter som robotar kan utföra autonomt, genom användning av skalbar mänsklig övervakning. Via RoboTurk, distansarbetare kan logga in på en webbplats och samla uppgiftsdemonstrationer, använder sin smartphone som en rörelsekontroll.
"RoboTurk stöds av en molnbaserad simuleringsbackend som strömmar video till en klients webbläsare med kommunikationsprotokoll med låg latens, "Förklarade Mandlekar." Detta säkerställer en homogen kvalitet på tjänsterna oavsett klientens datoreresurser, vilket resulterar i en plattform som är intuitiv att använda och har en låg inträdesbarriär, som är kärnkraven för en crowdsourced -uppgift. RoboTurk stöder flera robotar, uppgifter, och simulatorer, och kan enkelt utökas för att stödja andra. "
Forskarna utvärderade sin plattform på tre manipulationsuppgifter av varierande längd, från 15 till 120 sekunder. De fann att RoboTurk delade statistiska likheter med speciell hårdvara, till exempel virtuella verklighetskontroller. De observerade också att dåliga nätverksförhållanden inte väsentligt påverkade användarnas förmåga att utföra uppgifter framgångsrikt på plattformen. Med RoboTurk, de samlade in 137,5 timmars manipulationsdata från distansarbetare, med över 2200 framgångsrika uppgiftsdemonstrationer under 22 timmar av total systemanvändning.
Upphovsman:Mandlekar et al.
"Jag tror att den mest meningsfulla delen av plattformen är hur det kommer att göra det möjligt för människor och robotar att interagera, "Animesh Garg, postdoktorand som leder projektet, berättade TechXplore. "Robotar är framtidens smarta verktyg. Vi ska inte tänka på dem som en ersättning för människor utan snarare som ett sätt att utöka våra möjligheter. Detta ger människor möjlighet att vara mer produktiva och fokusera på intelligensproblem på högre nivå, på samma sätt som tillkomsten av datorer gjorde det lättare för människor att använda matematik som ett verktyg för att lösa intresseproblem. "
RoboTurk möjliggör effektivt policyinlärning om flerstegsmanipuleringsuppgifter med glesa belöningar. Dessutom, Mandlekar och hans kollegor fann att användning av större mängder demonstrationer under policyinlärning hade betydande fördelar, vilket leder till bättre prestanda och större inlärningskonsistens.
I framtiden, RoboTurk kan bli en nyckelresurs inom robotik, underlätta utvecklingen av mer avancerade och bättre presterande robotar. Forskarna tillämpar nu RoboTurk på riktiga robotar, samtidigt som de utvecklar algoritmer som kan använda data som de samlat in för att lära robotar färdigheter på låg nivå.
"Robotar är en mycket spännande teknik som gör det möjligt för människor att vara mer produktiva och oberoende inom alla områden av mänsklig verksamhet, till exempel att ge en hjälpande hand i köket, vårdare för den äldre befolkningen, och bättre vård för patienter, "Sa Garg." En av de saker som lockar oss är demokratiseringen av tillverkningen. Denna teknik kan göra det möjligt för människor att tillverka och sälja anpassade produkter utan behov av specialutrustning, precis som YouTube har demokratiserat skapande och distribution av innehåll, så att alla kan skapa och dela videor. "
© 2018 Science X Network