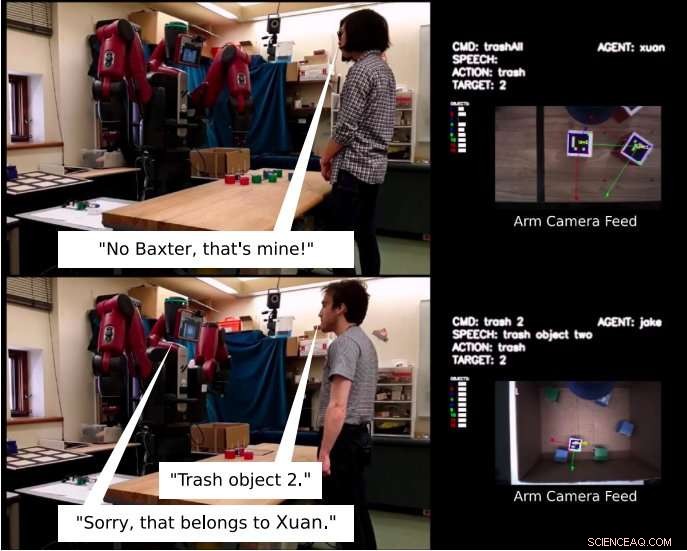
Ägarskapslärande via människa-robot-interaktion. Överst:Roboten stoppas verbalt mitt i handlingen av Xuan från att kassera objekt 2. Nederst:Efter att ha lärt sig ägarförhållandena och handlingsbehörigheterna genom att interagera med Xuan, roboten nekar Jakes begäran att kassera objekt 2. Kredit:Tan, Brawer &Scassellati.
Ett team av forskare vid Yale University har nyligen utvecklat ett robotsystem som kan representera, lära sig och sluta sig till ägarförhållanden och normer. Deras studie, förpublicerad på arXiv, tar upp några av de komplexa utmaningar som är förknippade med att lära robotar sociala normer och hur man anpassar sig till dem.
Allt eftersom robotar blir vanligare, det är viktigt för dem att kunna kommunicera med människor både effektivt och ändamålsenligt. En nyckelaspekt av mänsklig interaktion är att förstå och bete sig enligt sociala och moraliska normer, eftersom detta främjar positiv samexistens med andra.
Ägarskapsnormer är en uppsättning sociala normer som hjälper till att navigera i delade miljöer på sätt som är mer hänsynsfulla mot andra. Att lära ut dessa normer till robotar kan förbättra deras interaktion med människor, så att de kan skilja mellan oägda verktyg och ägda verktyg som tillfälligt delas med dem.
"Mitt forskningslabb fokuserar på att bygga robotar som är lätta för människor att interagera med, "Brian Scassellati, en av forskarna som genomförde studien, berättade för TechXplore. "En del av det arbetet är att titta på hur vi kan lära maskiner om vanliga sociala koncept, saker som är väsentliga för oss som människor men som inte alltid är de ämnen som väcker mest uppmärksamhet. Förståelse om objektägande, behörigheter, och tullen är ett av dessa ämnen som egentligen inte har fått mycket uppmärksamhet men som kommer att vara avgörande för hur maskiner fungerar i våra hem, skolor, och kontor."
I det tillvägagångssätt som utarbetats av Scassellati, Xuan Tan och Jake Brawer, ägande representeras som en graf över probabilistiska relationer mellan objekt och deras ägare. Detta kombineras med en databas med predikatbaserade normer, som begränsar de åtgärder som roboten tillåts utföra med ägda föremål.
"En av utmaningarna i det här arbetet är att några av de sätt som vi lär oss om ägande är genom att få veta tydliga regler (t.ex. 'ta inte mina verktyg') och andra lär sig genom erfarenhet, ", sa Scassellati. "Att kombinera dessa två typer av lärande kan vara lätt för människor, men är mycket mer utmanande för robotar."
Systemet som utarbetats av forskarna kombinerar en ny inkrementell norminlärningsalgoritm som är kapabel till både engångsinlärning och induktion från exempel, med Bayesiansk slutledning av ägarförhållanden som svar på uppenbara regelöverträdelser och uppfattningsbaserad förutsägelse av ett objekts sannolika ägare. Tillsammans, dessa komponenter tillåter systemet att lära sig ägandenormer och relationer som är tillämpliga i en mängd olika situationer.
"Nyckeln till det arbete som Xuan och Jake gjorde var att kombinera två olika typer av maskininlärningsrepresentation, en som lär sig av dessa explicita, symboliska regler och en som lär sig av små erfarenheter, Scassellati förklarade. "Att få dessa två system att fungera tillsammans är både det som gör det här utmanande, och på slutet, vad gjorde detta framgångsrikt."
Forskarna utvärderade prestandan hos deras robotsystem i en serie simulerade och verkliga experiment. De fann att det effektivt kunde slutföra objektmanipuleringsuppgifter som krävde en mängd olika ägandenormer som skulle följas, med enastående kompetens och flexibilitet.
Studien utförd av Scassellati och hans kollegor ger ett anmärkningsvärt exempel på hur robotar kan tränas att sluta sig till och respektera sociala normer. Ytterligare forskning skulle kunna tillämpa liknande konstruktioner på andra normrelaterade förmågor och adressera komplexa situationer där olika normer eller mål står i konflikt med varandra.
"Vi fortsätter att titta på hur man bygger robotar som interagerar mer naturligt med människor, och denna studie fokuserar bara på en aspekt av detta arbete, sa Scassellati.
© 2018 Science X Network