En ny "ambidextrous" tillvägagångssätt gör att robotar kan greppa en mängd olika föremål utan träning. Kredit:Adriel Olmos
E-handeln fortsätter att expandera och nådde nya nivåer under den senaste semestersäsongen. För att snabbt kunna uppfylla den enorma volymen och variationen av beställningar, företag som Amazon, Walmart, och Alibaba satsar stort på nya lager. För att komma till rätta med bristen på arbetskraft, många företag överväger robotar. Dock, Att på ett tillförlitligt sätt ta tag i ett varierat utbud av produkter är fortfarande en stor utmaning för robotteknik.
I en tidning som publicerades i onsdags, 16 januari, i Vetenskapsrobotik , ingenjörer vid University of California, Berkeley presenterar en roman, "ambidextrous" tillvägagångssätt för att förstå en mångfald av objektformer utan träning.
"Varje enskild gripare kan inte hantera alla föremål, " sa Jeff Mahler, en postdoktor vid UC Berkeley och huvudförfattare till artikeln. "Till exempel, en sugkopp kan inte skapa en tätning på porösa föremål som kläder och gripdon med parallellkäftar kanske inte kan nå båda sidorna av vissa verktyg och leksaker."
Mahler arbetar i Ken Goldbergs labb, en UC Berkeley professor med gemensamma utnämningar vid institutionen för elektroteknik och datavetenskap och institutionen för industriell teknik och operationsforskning.
De robotsystem som används i de flesta e-handelsuppfyllelsecenter är beroende av suggripare som kan begränsa utbudet av objekt de kan greppa. UC Berkeley-papperet introducerar en "ambidextrous" metod som är kompatibel med en mängd olika typer av gripdon. Tillvägagångssättet bygger på en gemensam "belöningsfunktion" för varje gripartyp som kvantifierar sannolikheten för att varje gripare kommer att lyckas. Detta gör att systemet snabbt kan bestämma vilken gripare som ska användas för varje situation. För att effektivt beräkna en belöningsfunktion för varje gripartyp, uppsatsen beskriver en process för att lära sig belöningsfunktioner genom att träna på stora syntetiska datamängder som snabbt genereras med hjälp av strukturerad domänrandomisering och analytiska modeller av sensorer och fysik och geometri för varje gripare.
När forskarna tränade belöningsfunktioner för en gripare med parallellkäft och en sugkoppsgripare på en tvåarmad robot, de fann att deras system rensade papperskorgar med upp till 25 tidigare osynliga föremål med en hastighet av över 300 plockningar per timme med 95 procents tillförlitlighet.
"När du är på ett lager och sätter ihop paket för leverans, föremål varierar avsevärt, ", sa Goldberg. "Vi behöver en mängd olika gripdon för att hantera en mängd olika föremål."
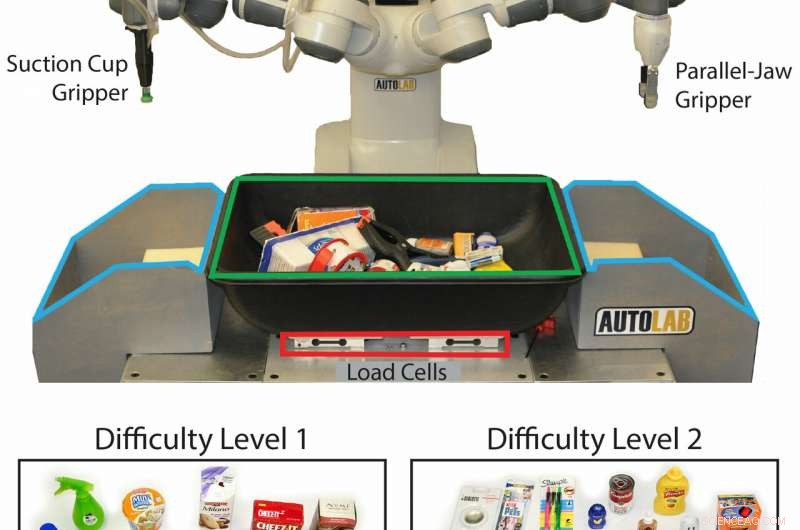
Installation av den tvåarmade ambidextrousroboten och föremålen som den försökte greppa, kategoriseras i två svårighetsgrader. Kredit:Mahler et al., Sci. Robot. 4, eaau4984 (2019)