Kredit:Ashby et al.
Forskare vid Auckland Bioengineering Institute och Technische Universität Dresden har nyligen designat en ny typ av uppblåsbar robot för rymdnavigering. Dessa robotar, presenteras i en artikel publicerad i SPIE Digital Library, skapades med hjälp av dielektriska elastomergivare (DETs), som huvudsakligen är elektriska kondensatorer gjorda av mjuka gummiartade material.
"Nuvarande rymdteknologi är begränsad av dess massa och volym. Det tar tusentals dollar att skjuta upp ens ett enda kilogram i omloppsbana, "Joseph Ashby, en av forskarna som genomförde studien, berättade för TechXplore. "Vår forskning syftar till att ersätta eller utöka nuvarande teknologi med lättare smarta materialersättningar i kombination med uppblåsbara strukturer."
Om de är integrerade med uppblåsbara strukturer, DET:er kan hjälpa utvecklingen av mjuka och lågmassarobotar, som har hög förpackningseffektivitet och är lätta att använda. Faktiskt, DET:er deformeras när en spänning appliceras på dem, på grund av Maxwell-spänningen som genereras av det elektriska fältet.
Till skillnad från traditionella elmotorer, dessa kondensatorer tillåter forskare att producera ett brett spektrum av rörelser och krafter utan komplexa, tunga växelmekanismer. DET:er kan också användas som töjningssensorer genom att övervaka deras förändringar i kapacitans när de sträcks ut. Detta gör att de även har en självsensorisk fördel utan behov av externa övervakningssystem.
"Eftersom de är helt gjorda av mjuka material, DET-strukturer kan blåsas upp på samma sätt som en ballong, " Ashby förklarade. "Detta betyder att de kan bilda stora strukturer när de används, men kan packas i små utrymmen i förväg, vilket gör dem till idealiska kandidater för rymdapplikationer, där lanseringsmöjligheterna är volymbegränsade."
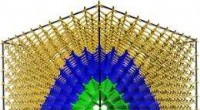
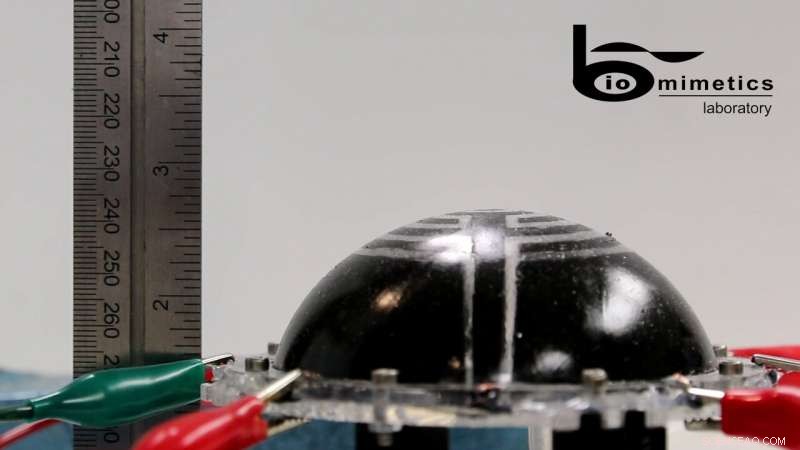
I deras studie, Ashby och hans kollegor undersökte rörelserna som uppnåddes från aktiveringen av tre experimentella konstruktioner. I den första av dessa mönster, robotens kupolställdon är byggt av ett ark silikongummi med segmenterade elektroder.

Kredit:Ashby et al.
Den andra designen är liknande, men med en förlängning av kupolaktuatorn för att producera rörelserörelse från fasad aktivering av segment. Till sist, den tredje är en valsad cylindrisk design med variationer i sömmens geometri, elektrodposition och sammansättning, vilket gjorde det möjligt för forskarna att uppnå flera resonans- och icke-resonansrörelser.
"På en stor skala, genom att tillåta utplacering av stora strukturer som kan röra sig och/eller självstrukturell hälsoövervakning från låg massa, bärraketer med låg volym, vi skulle kunna utöka våra rymdutforskningsmöjligheter, " sa Ashby. "På ett smalare fokus, att ge mindre satelliter (med ökande popularitet) chansen att distribuera och styra antenner eller arrayer som annars skulle vara för stora för sin storlek skulle ge dem avsevärt förbättrade kommunikations- och kraftfaciliteter."
Ashby och hans kollegor modellerade var och en av sina konstruktioner med hjälp av kommersiellt tillgänglig FEM-mjukvara och testade dem sedan i simuleringar när de genomgick uppblåsning och aktivering. Även om deras experiment gav lovande resultat, robotarna är fortfarande i mycket tidiga utvecklingsstadier.
För att deras teknik ska bli ett genomförbart alternativ till nuvarande rymdmanöverdon, forskarna behöver fortfarande övervinna ett antal viktiga utmaningar. Till exempel, driften av DET i rymden har hittills visat sig vara opraktisk på grund av ett antal komplexa miljöförhållanden.
"Vi planerar nu att fortsätta utveckla våra befintliga prototyper, men även utforska andra möjliga konstruktioner för en mängd olika applikationer, ", sa Ashby. "Vi arbetar också med att utveckla skärmningsmetoder för att skydda våra robotar från den hårda rymdmiljön."
© 2019 Science X Network