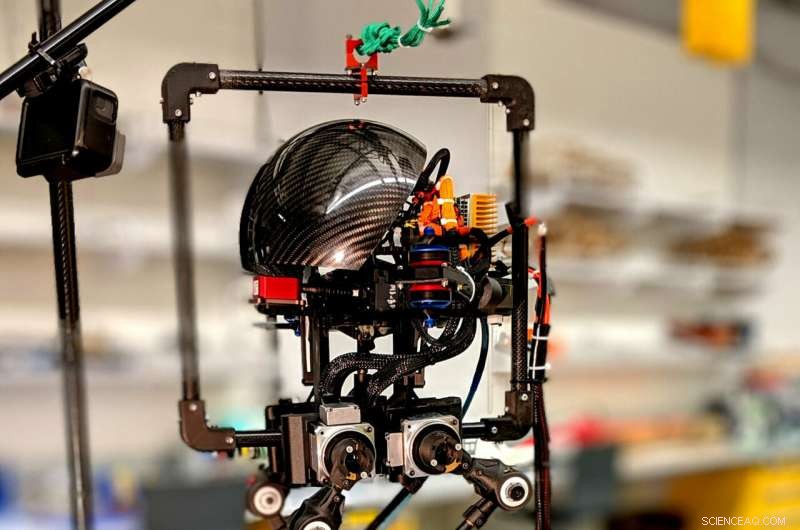
Leo är ungefär två och en halv fot lång, på tunn, böjda ben. Upphovsman:Alireza Ramezani, Soon-Jo Chung, och Morteza Gharib
En bipedal robot går på ytan av en avlägsen planet. Dess sensorer skannar miljön, skicka data tillbaka till jorden. Det kommer till en sönderfallande sluttning, böjer knäna och hoppar, thrusters whirring, att landa säkert ovanför det lösa berget.
Denna framtid är fortfarande en avlägsen dröm bort, men Alireza Ramezani, en biträdande professor i el- och datateknik vid Northeastern, har tagit det ett steg närmare med sin nya robot.
Roboten är känd som LEONARDO, en förkortning för LEg ON Aerial Robotic DrOne, eller Leo för kort. Den har en förmåga som de flesta robotar idag inte har:Den kan både gå och flyga.
"Initialt, den utvecklades med tanken på att designa upptäcktsresande - system som kan kombinera rörlighet i benen och snabb flygförmåga för att utföra autonoma utforskningar, "Sa Ramezani.
Leo är ungefär två och en halv fot lång, på tunn, böjda ben. Med en kropp som huvudsakligen består av kolfiber, roboten är stark, men väger bara sex kilo. Den har thruster på båda sidor av vad Ramezani kallar bålen. Dessa kan ge dragkraft i båda riktningarna, och är tillräckligt kraftfulla för flygning. Men det är inte deras primära funktion.
"Tanken är inte att skapa en quadcopter, "Ramezani sa." Tanken är att ha en maskin som kan utnyttja benen och propellerna till, till exempel, förbättra sin hoppkapacitet. "
Thrusterarna kan också hjälpa till att stabilisera roboten på ojämna ytor, eller fånga den om den börjar falla.
"Detta är den stora utmaningen för legged system, eller till och med människor:Vi kan stabilisera vår kropp, men ibland faller vi, "Sade Ramezani." Tänk om vi kunde ha en robot som aldrig faller? "
Ramezani började studera benbaserade robotsystem under sitt examensarbete vid University of Michigan. Gångrobotar kämpar ofta på ojämn terräng. Just då, han undrade om det fanns ett sätt att sätta in en krockkudde för att dämpa en fallande robot. Nu har han designat en robot som kan fånga sig själv.
Idén kom från att titta på fåglar, Sa Ramezani. De flesta robotdesigner fokuserar uteslutande på en typ av rörelse, men fåglar kan gå, flyga, och även springa.
"Du kan se teknik till perfektion i naturen, och vi kan lära oss mycket, sa Ramezani, som också har byggt en flygande robot baserad på flygakrobatik från fladdermöss. "Det har varit en inspiration för mig i nästan alla mina mönster."
När Ramezani gick med i nordöstra i höstas, Leo stannade kvar vid California Institute of Technology, där Ramezani varit postdoktor. Han planerar att bygga en uppdaterad version av roboten i Boston, för nordöstra studenter att använda som en lärande plattform.
"I detta skede, Jag ser det här som en mycket bra plattform för att driva agil robotik. Tänk på en robot som bokstavligen aldrig faller:Den kan förhandla om grov terräng, det kan flyga, det kan hoppa. Ett ultrakapabelt system, "Sa Ramezani." Nedför vägen, vi kan använda en sådan maskin för utforskning. "