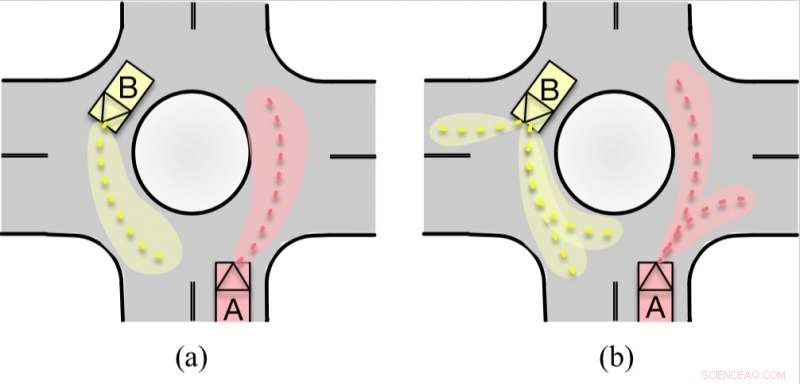
Demonstrationer av (a) enkelmodala och (b) multimodala förutsagda distributioner. Kredit:Hu, Zhan och Tomizuka.
Forskare vid University of California (UC), Berkeley, har nyligen utvecklat en generativ modell som kan förutsäga de sekventiella rörelserna av par av interagerande agenter, inklusive självkörande fordon samt fordon med mänskliga förare. Deras metod, beskrivs i en tidning som förpublicerats på arXiv, är tolkbar, vilket betyder att den kan förklara logiken bakom sina förutsägelser, leder till större tillförlitlighet och generaliserbarhet.
"För att autonoma agenter ska framgångsrikt verka i den verkliga världen, förmågan att förutse framtida rörelser hos omgivande enheter på scenen kan avsevärt förbättra deras säkerhetsnivåer, låta dem undvika farliga situationer i förväg, "Japp Hu, en av forskarna som genomförde studien, berättade för TechXplore.
Tidigare studier har uppnått anmärkningsvärda resultat när det gäller att förutsäga beteendet hos enskilda medel eller fordon. Enligt Hu och hennes kollegor, dock, att överväga dessa medel individuellt är ofta föga hjälpsamt och begränsande, som i den verkliga världen (t.ex. på vägen), dessa medel interagerar typiskt med varandra och deras tillstånd är därför kopplade. Dessutom, när den förutsagda horisonten expanderar, modellering av förutsägelseosäkerheter och multimodala distributioner för framtida sekvenser blir alltmer utmanande.
"I vår studie, vi tog oss an denna utmaning genom att presentera en multimodal probabilistisk prediktionsmetod, "Hu sa. "Den föreslagna metoden är baserad på en generativ modell och kan gemensamt förutsäga sekventiella rörelser för varje par av interagerande agenter."
Som förklarat av Wei Zhan, en annan forskare involverad i studien, denna gemensamma förutsägelse möjliggör slutligen reaktionsförutsägelse av andra agenters rörelser. Det kan ge svar på "tänk om"-frågor, som "Vad skulle andras möjliga reaktioner vara om det autonoma värdfordonet vidtar en specifik åtgärd i framtiden?" Reaktionsförutsägelse är extremt viktig för självkörande fordon i mycket interaktiva körscenarier.
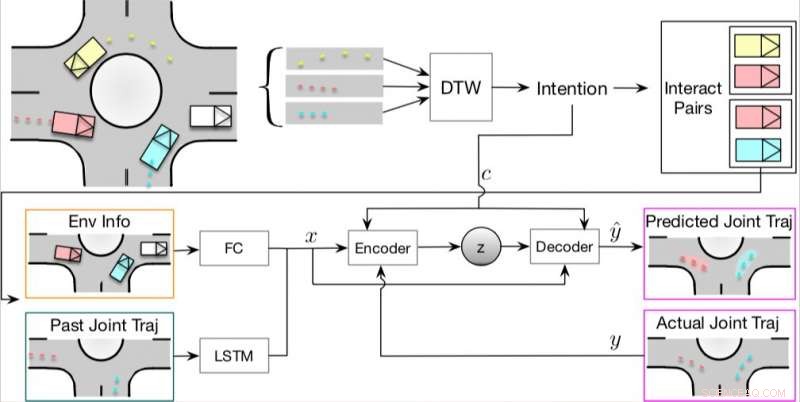
(a) Den övergripande strukturen för den föreslagna metoden. b) Rondellkarta över alla referensvägar. Kredit:Hu, Zhan och Tomizuka.
Modellen som utvecklats av Hu och hennes kollegor är baserad på en nyckelalgoritm, som har en liknande struktur som traditionella variationsautokodare (VAE). I deras studie, forskarna använde sin modell för att förutsäga det interaktiva beteendet mellan två fordon, dubbade A och B.
"Multimodalitet kan ses i både diskreta och kontinuerliga aspekter, " förklarade Hu. "Det kan finnas många diskreta, avsikter på hög nivå som är fixerade i en människas sinne, som till exempel sväng vänster/höger eller kör av vid ett visst körfält i rondellscenariot. Också, under varje avsikt, det finns flera kontinuerliga interaktioner såsom olika grader av godkänt/avkastningsbeteende. Därför, det är nödvändigt att ta itu med multimodaliteten när vi förutsäger andra fordons framtida beteende, vilket kan leda oss till mer exakta och rimliga förutsägelseresultat."
Verkliga rörelsedata i mycket interaktiva körscenarier är den viktigaste tillgången och förutsättningen för forskning om beteende och rörelseprediktion. Forskarna använde en komplex 7-vägsrondell med tung trafik för att samla in stora mängder mycket interaktiv rörelsedata.
Data de samlade in användes för att träna och utvärdera den föreslagna modellen, ger mycket lovande resultat. Deras tillvägagångssätt överträffade tre alternativa modeller som vanligtvis används för att förutsäga rörelsen hos autonoma agenter, nämligen villkorlig VAE, multilayer perceptron (MLP) ensemble och Monte Carlo (MC) dropout. I framtiden, deras laboratorium kommer också att publicera en mer omfattande rörelsedatauppsättning.
"I vårt senaste arbete, vi visade det underliggande resonemanget för provtagningsprocessen för de förutsagda resultaten, ", sa Hu. "Även om det fortfarande är en lång väg att gå för att helt förstå dessa svarta lådans algoritmer (dvs. neurala nätverk), vi försökte tillhandahålla lite meningsfull information om en sådan svart-box-algoritm och försökte göra den föreslagna algoritmen säker att använda. Om dessa förutsägelsealgoritmer kommer att användas i riktiga autonoma fordon en dag, tillräckliga resonemang bakom prediktionsalgoritmen kommer definitivt att behövas."
Modellen som utarbetats av Hu och hennes kollegor kan bidra till att öka säkerheten för autonoma fordon, så att de kan förutsäga interaktioner mellan andra fordon på vägen. I hennes nästa studier, Hu planerar att ta itu med säkerhetssidan av förutsägelsealgoritmen ytterligare, samtidigt som man försöker göra förutsägelseprocessen mer transparent.
© 2019 Science X Network