Kredit:Chen et al.
Nanogeneratorer, tekniska verktyg som kan omvandla mekanisk eller termisk energi till elektricitet, finns i tre nyckeldesigner:piezoelektriska, triboelektriska och pyroelektriska. Medan piezoelektriska och triboelektriska nanogeneratorer kan omvandla mekanisk energi till elektricitet, pyroelektriska fungerar genom att skörda värmeenergi.
Under de senaste åren, tribolektriska nanogeneratorer har blivit alltmer populära för både energiupptagning och avkänningstillämpningar. Än så länge, dock, deras prestanda inom flerdimensionell informationsuppfattning och interaktiva kontrolluppgifter har varit ganska nedslående.
Forskare vid National University of Singapore har nyligen utvecklat sensorer för att styra objekt i 3D -utrymme baserat på triboelektriska nanogeneratorer. Dessa sensorer, presenteras i ett papper publicerat i Nano Energy , består av en parallell struktur med tre symmetriska sensorremsor fixerade på basen och en mobil scen ansluten till dem.
"Med vetenskapens utveckling, automation och robotteknik har trängt in i många aspekter av mänsklig verksamhet, "Tao Chen, en av forskarna som genomförde studien, berättade TechXplore. "Robotar används inte bara mycket i automatiska produktionslinjer och underhållningsområden, men kan också ha medicinsk, flyg- och militärapplikation, liksom många andra. Dock, det finns otillgängliga, oförutsägbara farliga eller oundvikliga utmaningar för människor att interagera eller utföra komplexa uppgifter i miljöer där utrustning hålls i vakuum, undervattens, utrymme och nanometer skala, etc."
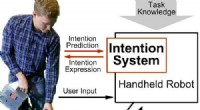
För att möjliggöra effektiva interaktioner mellan människor och automatiserade system, forskare har utvecklat kontrollterminaler som kan drivas på olika sätt, som pekskärmar, tangentbord eller vippkonstruktioner. I de flesta fallen, dessa kontrollmekanismer är indirekta, sålunda behöver de komplexa instruktionsanalyser och beräkningar för att motsvara rörelsestillståndet för objektet som ska manipuleras.
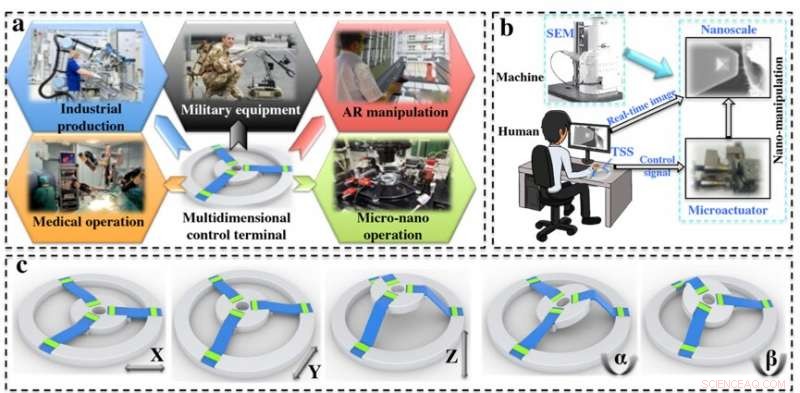
"I det här pappret, vi presenterar en ultra-töjbar triboelektrisk remssensor (TSS) för att styra attityden hos objektet i rymden, "Chen förklarade." Vår TSS kan förbättra robotarnas prestanda i en mängd olika miljöer, inklusive undervattens, utrymme och mer. "
I deras studie, Chen och hans kollegor använde en ultra-töjbar tribolelektrisk remsa som en rumslig sensor, vilket i slutändan tillåter robotar att styra objekt i 3D -rymden. På grund av kopplingseffekten av triboelektrifiering och elektrostatisk induktion, remsans längd ändras, med samma fingerkontaktpunkt som genererar olika signalutmatningsförhållanden från två terminalelektroder (E1 och E2). Dessa elektroder fungerar som det interaktiva gränssnittet för flerdimensionell avkänning och kontroll.
"Ena änden av remsans E1 -elektrod är fixerad, medan elektroden E2 är rörlig under dragspänning med avseende på E1, "Sa Chen." Utgångsspänningsförhållandet för de två elektroderna (VE2/VE1) erhålls under kontakt och separation av finger- och silikongummi med konstant avstånd från E1. Vidare, remsan sträcks med en viss längd, minskningen av spänningsförhållandet bestäms när vi vidrör samma position (referenspunkt) på ett konstant avstånd i förhållande till E1-elektroden. "
När remsans sträckningslängd ökar, detta spänningsförhållande minskar. Den mekanism som Chen och hans kollegor använde tillät dem att mäta den förlängda längden på E2 -sidan av remsan, genom att vidröra referenspunkten som är fixerad från E1. Med andra ord, förskjutningen av deras remsa medan den är sträckt, dess sträckningshastighet och E2 -elektrodens acceleration kan alla mätas med en konstant kontaktfrekvens.
"Principen för sensordetektering som används här är främst att bestämma längden genom att jämföra spänningsförhållandet mellan de två elektroderna, "Sa Chen." Följaktligen detekteringsmekanismen som använder metoden för spänningsförhållande undviker påverkan av miljöfuktighet och ojämn kraft. Så, Detta är en effektiv detektionsmetod för att undvika instabilitet och störningar. "
Chen och hans kollegor introducerade en ny objektdetekteringsmetod baserad på en längsgående rörelsessensor som använder genererade spänningsförhållanden. I deras studie, de använde tre självdrivna flexibla sensorer för att uppnå en 5D-positioneringsprojektion i rymden. Deras metod är enklare och mer intuitiv än underliggande traditionella styva (icke-töjbara) strukturer, men det ger också rymddimensioner.
"För närvarande, driften av nanoskala med handtag eller knappläge är inte intuitiv, "Chen sa." Vårt tillvägagångssätt kan vara mer flexibelt och intuitivt för interaktioner mellan människor och maskiner i nanoskala. "
I en inledande demonstration, forskarna använde sin TSS-enhet som en human-nanomaskinterminal för att styra sin nanomanipulator i en skanningelektronmikroskopi (SEM) uppgift. I denna uppgift, deras enhet gjorde det möjligt för dem att driva kolnanorören och framgångsrikt slutföra extraktionen av kolnanorör.
"De mikro-nanomanipuleringsresultat som vi samlat in bekräftar TSS-enhetens utmärkta prestanda på perceptuella och kontrollapplikationer, som är relevanta för områden som robotik, VR och IoT, "Sa Chen." I en uppföljningsstudie, vi planerar att utföra forskning om den tvåhandsstyrenheten, för att uppnå mer intuitiv och bekväm människa-maskin-interaktion. "
© 2019 Science X Network