Kredit:University of Bristol
I en ny vändning på människa-robotforskning, datavetare vid University of Bristol har utvecklat en handhållen robot som först förutsäger och sedan frustrerar användare genom att göra uppror mot deras planer, därigenom visa en förståelse för mänsklig avsikt.
I en alltmer tekniskt värld, samarbete mellan människor och maskiner är en väsentlig aspekt av automatisering. Denna nya forskning visar att frustrerande människor med avsikt är en del av processen att utveckla robotar som bättre samarbetar med användare.
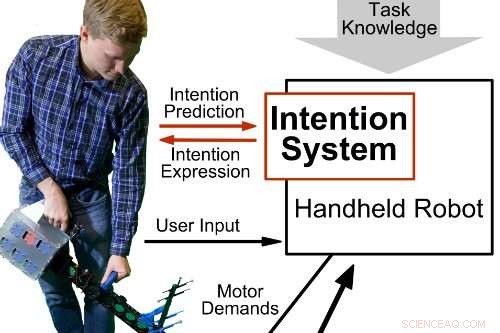
Teamet på Bristol har utvecklat intelligenta, handhållna robotar som utför uppgifter i samarbete med användaren. Till skillnad från konventionella elverktyg, som inte vet något om de uppgifter de utför och är helt under användarnas kontroll, den handhållna roboten har kunskap om uppgiften och kan hjälpa till genom vägledning, finjusterade rörelser och beslut om uppgiftssekvenser.
Även om detta hjälper till att utföra uppgifter snabbare och med högre noggrannhet, användare kan bli irriterade när robotens beslut inte är i linje med deras egna planer.
Senaste forskningen inom detta område av Ph.D. kandidat Janis Stolzenwald och professor Walterio Mayol-Cuevas, från University of Bristols institution för datavetenskap, utforskar användningen av intelligenta verktyg som kan påverka deras beslut som svar på användarnas avsikter.
Denna forskning är en ny och intressant vändning på forskning om människa-robot eftersom den syftar till att först förutsäga vad användarna vill ha och sedan gå emot dessa planer.
Professor Mayol-Cuevas sa:"Om du är frustrerad över en maskin som är avsedd att hjälpa dig, detta är lättare att identifiera och mäta än de ofta svårfångade signalerna om samarbete mellan människa och robot. Om användaren blir frustrerad när vi instruerar roboten att göra uppror mot sina planer, vi vet att roboten förstod vad de ville göra."
"Precis som kortsiktiga förutsägelser om varandras handlingar är avgörande för framgångsrikt mänskligt lagarbete, vår forskning visar att integration av denna förmåga i kooperativa robotsystem är avgörande för framgångsrikt samarbete mellan människa och maskin."
För studien, forskare använde en prototyp som kan spåra användarens ögonblick och härleda kortsiktiga förutsägelser om avsedda åtgärder genom maskininlärning. Denna kunskap används sedan som underlag för robotens beslut som till exempel vart man ska flytta härnäst.
Bristol -teamet tränade roboten i studien med hjälp av en uppsättning med över 900 träningsexempel från en plock -och -plats -uppgift som deltagarna utförde.
Kärnan i denna forskning är bedömningen av avsiktsförutsägelsemodellen. Forskarna testade roboten för två fall:lydnad och uppror. Roboten var programmerad att följa eller inte lyda användarens förutspådda avsikt. Att känna till användarens mål gav roboten makten att göra uppror mot deras beslut. Skillnaden i frustrationssvar mellan de två tillstånden fungerade som bevis för riktigheten av robotens förutsägelser, därmed validera avsikt-förutsägelse modellen.
Janis Stolzenwald, en doktorsexamen student sponsrad av German Academic Scholarship Foundation och Storbritanniens EPSRC, genomförde användarexperimenten och identifierade nya utmaningar för framtiden. Han sa:"Vi fann att avsiktsmodellen är mer effektiv när blickdata kombineras med uppgiftskunskap. Detta väcker en ny forskningsfråga:hur kan roboten hämta denna kunskap? Vi kan föreställa oss att lära från demonstration eller involvera en annan människa i uppgift."
Som förberedelse för denna nya utmaning, forskarna undersöker för närvarande delad kontroll, interaktion och nya tillämpningar inom sina studier om fjärrsamarbete genom den handhållna roboten. En underhållsuppgift fungerar som ett användarexperiment, där en handhållen robotanvändare får assistans genom en expert som fjärrstyr roboten.
Forskningen bygger på den handhållna roboten designad och byggd av tidigare doktorand. student Austin Gregg-Smith, och som är tillgänglig som en öppen källkodsdesign via forskarens webbplats på www.handheldrobotics.org.