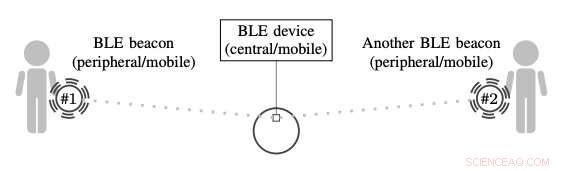
Denna figur visar den övergripande experimentuppställningen. En central BLE-enhet används för att passivt skanna efter annonser för perifera BLE-enheter. Människor kan vara utrustade med en eller flera reklam-BLE-enheter. Den centrala enheten beräknar paket med RSS-data och ID för mottagna annonser. Dessa paket tillhandahålls via en trådbunden anslutning till ett annat system på robotens kort eller trådlöst via Bluetooth-anslutning till en annan maskin. Eftersom forskarna inte har tillgång till robotens styrelse, de använde bluetooth-anslutningen vilket gav ytterligare latens. Kredit:Scheunemann et al.
Forskare vid University of Hertfordshire har nyligen föreslagit en enkel och konfigurerbar teknik som förbättrar en robots förmåga att uppfatta och interagera med människor i sin omgivning. Deras teknik, presenteras i en tidning förpublicerad på arXiv, använder prisvärda Bluetooth-lågenergienheter (BLE). Bland dess många möjliga tillämpningar, det kan förbättra behandlingen för barn med autismspektrumstörning (ASD), låter robotar fungera som medlare och övervaka barn i sin omgivning.
"Jag är intresserad av robotar som kan interagera helt autonomt utan extern kontroll och utan en extern dator, " Marcus M. Scheunemann, en av forskarna som genomförde studien, berättade för TechXplore. "Jag började mitt arbete vid University of Hertfordshire för att utveckla robotar som kan vara förmedlare under terapi för barn med autism."
Att utveckla robotar som exakt kan känna igen närheten till och mellan barn är en mycket utmanande uppgift. Detta beror på att barn i allmänhet är ganska spontana i sina beslutsprocesser, därav, de kan röra sig mycket och ständigt ändra sin interaktionsstil. Detta gör det svårare för robotar att spåra barn med traditionella metoder som kameror eller sensorer, särskilt om en robot är mobil och har liten beräkningskraft.
De flesta externa spårningsenheter som matar närhetsinformation till robotar behöver minst tre markörer för att kunna placeras på barn. Dessutom, för att fungera korrekt måste de bäras utåt och vara permanent synliga hela tiden.
Även om informationen från många befintliga spårningsenheter vanligtvis är korrekt, dessa enheter kan vara svåra att applicera på barn och begränsar vanligtvis deras rörelser till ett enskilt utrustat rum. För att övervinna begränsningarna med befintliga metoder, Scheunemann och hans kollegor utvecklade en ny teknik som gör att robotar kan känna igen beröring och närhet till andra människor med hjälp av BLE-enheter.
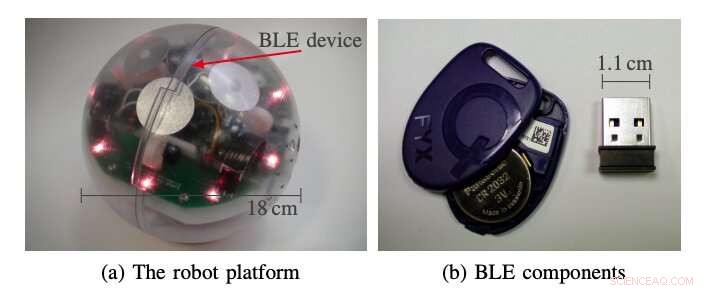
(a) Den mobila robotplattformen QueBall kan röra sig bakåt och luta åt vänster/höger. Den kan också avge ljud och färger och upptäcka beröring. Forskarna utvecklade inte denna robot; de använde det bara som ett exempel. (b) En självförsörjande och konfigurerbar reklamfyr som är avsedd att kopplas till personer (vänster) och en central Bluetooth-enhet, eller BLE-skanner, det vill säga utrustar roboten att skanna sin omgivning efter styrkan på perifera signaler (höger). Kredit:Scheunemann et al.
"Att använda BLE är ett prisvärt sätt att kringgå problemen med befintliga spårningstekniker, " sa Scheunemann. "När ett barn bär minst en BLE-fyr, en robot kan mäta signalstyrkan och härleda kunskap om vilket barn som interagerar vid en given tidpunkt eller när det blir berört. Fyrarna kan vara lika stora som ett knappcellsbatteri och kan placeras i kläder eller kepsar, utan att vara synlig från utsidan, i motsats till externa spårningsenheter."
Tekniken som skapats av Scheunemann och hans kollegor kräver ingen kamera och kan snabbt beräkna all information ombord. Dessutom, till skillnad från andra spårningsenheter, BLE-enheterna som används av forskarna är billiga och kan köpas enkelt från hyllan.
För att testa deras teknik, forskarna genomförde tre proof-of-concept-experiment i en bullrig laboratoriemiljö med en mobil sfärisk robot som heter QueBall. Först, de använde sin teknik för att förbättra robotens förmåga att sluta sig till information relaterad till närheten till individer i den omgivande miljön.
I ett andra experiment, Scheunemann och hans kollegor använde BLE-enheterna som beröringssensorer, låter QueBall känna igen när den berördes. Till sist, de använde sin teknik för att göra det möjligt för roboten att skilja mellan olika interagerande individer.
"Tekniken som vi föreslår gör det enkelt att ha en robot som förmedlare för autistisk barnterapi, " sa Scheunemann. "Med vår metod, en robot kan sluta sig till närhetsinformation om ett givet barn, utan att behöva kalibrera en kamera efter miljön eller för miljöförändringar. Den här tekniken kan även skalas för andra scenarier för interaktion mellan människa och robot där närhetsinformation till en människa behövs."
I sina utvärderingar, Scheunemann och hans kollegor fann att observation av den råa mottagna signalstyrkan (RSS) mellan olika BLE-enheter avsevärt förbättrade en robots interaktion med människor. I framtiden, deras teknik skulle kunna främja mer adaptivt beteende hos robotar som arbetar i en mängd olika miljöer. Till exempel, det skulle kunna underlätta användningen av robotar som terapiförmedlare för barn med ASD.
"I vårt framtida arbete, vi planerar att använda denna teknik för att utrusta robotar med BLE-skannrar, så att de enkelt kan sluta sig till information relaterad till närheten till och mellan interagerande människor."
© 2019 Science X Network