Kredit:Sun et al.
För att navigera i dynamiska miljöer, autonoma fordon (AV) bör kunna bearbeta all information som är tillgänglig för dem och använda den för att generera effektiva körstrategier. Forskare vid University of California, Berkeley, har nyligen föreslagit ett socialt uppfattningssystem för planering av beteendet hos autonoma bilar, vilket skulle kunna bidra till att utveckla AV:er som är bättre rustade för att hantera osäkerhet i sin omgivning.
"Min forskning har fokuserat på hur man designar människoliknande körbeteenden för autonoma bilar, "Lysande sol, en av forskarna som genomförde studien, berättade för TechXplore. "Vårt mål är att bygga AV:er som inte bara förstår mänskligt beteende, men också prestera på liknande sätt i flera aspekter, inklusive uppfattning, resonemang och handling."
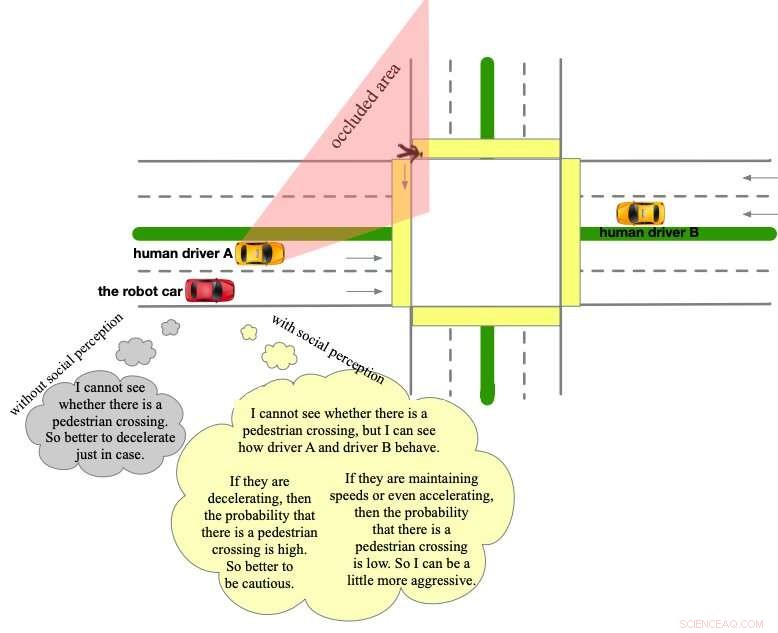
Sun och hennes kollegor observerade att mänskliga förare tenderar att behandla andra fordon som dynamiska hinder, drar ofta slutsatser om ytterligare information från deras beteende på vägen. Denna information är i allmänhet tilltäppt miljöinformation eller fysiskt oupptäckbar social information.
"Det skulle vara mycket viktigt och fördelaktigt för AV:er att bete sig på samma sätt, eftersom detta skulle göra dem mer intelligenta, mer människolik och i slutändan säkrare, " sa Sun. "I detta arbete, vi låter AV:er behandla alla andra vägdeltagare som dynamiska och distribuerade sensorer."
Det sociala uppfattningsschemat som föreslagits av Sun och hennes kollegor behandlar i huvudsak alla fordon och hinder på vägen som sensorer distribuerade i ett sensornätverk. Detta gör att AV:er kan observera både individuella beteenden och gruppbeteenden, använder sina observationer för att enhetligt uppdatera olika typer av osäkerheter inom ett "trosrum". Schemat fokuserar särskilt på osäkerheter i fysisk tillstånd (t.ex. orsakad av ocklusioner eller begränsat sensorområde) och sociala beteendemässiga osäkerheter (t.ex. lokala körpreferenser).
Schemat integrerar sedan uppdaterade sociala uppfattningar med en probabilistisk planeringsram baserad på modellprediktiv kontroll (MPC), vars kostnadsfunktion lärs in via invers förstärkningsinlärning (IRL). Denna kombination mellan en probabilistisk planeringsmodul och socialt förbättrad uppfattning gör att fordonen kan generera defensiva beteenden som är socialt kompatibla och därmed inte alltför strikta.
"Genom att observera andras beteenden och jämföra dem med tidigare beteendemodeller, AV:er kan resonera om möjliga tillstånd för de odetekterbara variablerna med endast sina egna sensorer, ", sa Sun. "Detta kan hjälpa AV:erna att minska uppfattningsosäkerheten, precis som människor gör. Jämfört med andra befintliga metoder, Idén i detta arbete utökar effektivt AV:s perceptionsförmåga utan någon extra hårdvara, och kan bidra till att skapa säkrare och effektivare manövrar."
Sun och hennes kollegor utvärderade sitt ramverk i en serie simuleringar med representativa scenarier med sensorocklusioner. De fann att genom att imitera människors sociala uppfattningsmekanismer, perceptionsmodulen upptäckte färre osäkerheter, i slutändan genererar säkrare och effektivare AV-beteenden via en icke-konservativ försvarsplanerare.
"Praktiskt taget, denna trevliga funktion kan göra AV:er mer effektiva i närvaro av ocklusioner, samt mer anpassningsbar i nya körmiljöer, eftersom de snabbt kan sluta sig till och lära sig om den fysiskt oupptäckbara sociala informationen i sin omgivning, " förklarade Sun.
I framtiden, det sociala uppfattningsschemat som tagits fram av detta team av forskare skulle kunna informera utvecklingen av självkörande bilar som kan navigera i ständigt föränderliga miljöer mer effektivt. Sun och hennes kollegor planerar nu att utveckla sitt ramverk ytterligare, ändra några av dess antaganden och göra det lättare att tillämpa i verkliga situationer.
"För att härleda ytterligare osäker information från andra vägdeltagares beteenden, AV:er bör vara utrustade med tidigare beteendemodeller som kan approximera andras faktiska beteenden, " Sun förklarade. "I det nuvarande arbetet, vi antar att alla andra vägdeltagare är rationella optimerare och approximerar sina beteendegenereringsmodeller via belöningsfunktioner. I vårt framtida arbete, vi kommer att lätta på antagandet om rationalitet för att göra approximationen mer praktisk."
© 2019 Science X Network