Stanford Doggo Project:en ODrive-driven fyrbäddsrobot
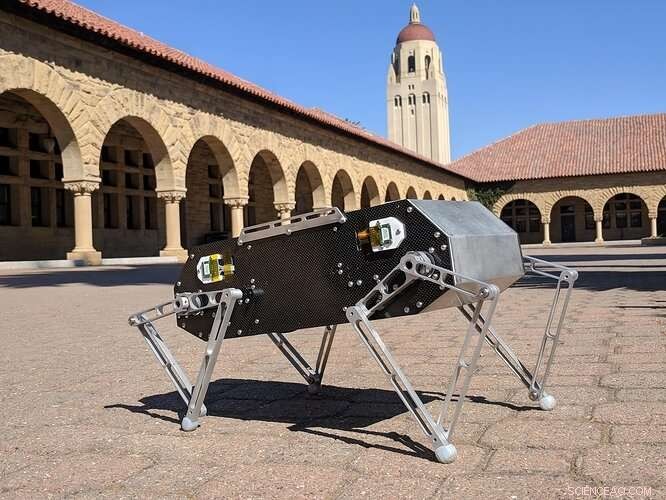
Att sätta sin egen twist på robotar som vandrar genom komplicerade landskap, Stanford Student Robotics-klubbens Extreme Mobility-team har utvecklat en fyrbensrobot som inte bara kan utföra akrobatiska trick och korsa utmanande terräng utan också är designad med reproducerbarhet i åtanke. Alla som vill ha sin egen version av roboten, dubbad Stanford Doggo, kan konsultera övergripande planer, kod och en leveranslista som eleverna har gjort fritt tillgänglig online.
"Vi hade sett dessa andra fyrdubbla robotar användas i forskning, men de var inte något som du kunde ta in i ditt eget labb och använda för dina egna projekt, sa Nathan Kau, '20, en maskiningenjör huvudämne och ledare för Extreme Mobility. "Vi ville att Stanford Doggo skulle vara den här roboten med öppen källkod som du kan bygga själv på en relativt liten budget."
Medan andra liknande robotar kan kosta tiotals eller hundratusentals dollar och kräver skräddarsydda delar, Extreme Mobility-studenterna uppskattar kostnaden för Stanford Doggo till mindre än $3, 000 – inklusive tillverknings- och fraktkostnader – och nästan alla komponenter kan köpas som de är online. De hoppas att tillgängligheten till dessa resurser inspirerar en gemenskap av Stanford Doggo-tillverkare och forskare som utvecklar innovativa och meningsfulla spin-offs från sitt arbete.
Redan Stanford Doggo kan gå, trav, dansa, hopp, hoppa och utför en och annan backflip. Eleverna arbetar på en större version av sin skapelse – som för närvarande är ungefär lika stor som en beagle – men kommer att ta en kort paus för att presentera Stanford Doggo vid den internationella konferensen om robotik och automation den 21 maj i Montreal, Kanada.
En hop, ett hopp och en backflip
För att göra Stanford Doggo replikerbar, eleverna byggde det från grunden. Detta innebar att man spenderade mycket tid på att undersöka lättillgängliga förnödenheter och testa varje del när de gjorde den, utan att förlita sig på simuleringar.
"Det har gått ungefär två år sedan vi först hade idén att göra en fyrfotad. Vi har definitivt gjort flera prototyper innan vi faktiskt började arbeta med denna iteration av hunden, sa Natalie Ferrante, '19, en maskinteknik coterminal student och Extreme Mobility Team-medlem. "Det var väldigt spännande första gången vi fick honom att gå."
Stanford Doggos första steg var visserligen små, men nu kan roboten upprätthålla en konsekvent gång och önskad bana, även när den möter olika terränger. Den gör detta med hjälp av motorer som känner av yttre krafter på roboten och bestämmer hur mycket kraft och vridmoment varje ben ska applicera som svar. Dessa motorer räknar om vid 8, 000 gånger i sekunden och är avgörande för robotens signaturdans:en studsande boogie som döljer det faktum att den inte har några fjädrar. Istället, motorerna fungerar som ett system av virtuella fjädrar, smidigt men uppmuntrande studsar tillbaka roboten till rätt form när de känner att den är ur position.
Bland de färdigheter och tricks som laget lade till robotens repertoar, eleverna var exceptionellt förvånade över dess hoppförmåga. Att köra Stanford Doggo genom dess steg en (mycket) tidig morgon i labbet, teamet insåg att det utan ansträngning dök upp 2 fot i luften. Genom att tänja på gränserna för robotens programvara, Stanford Doggo kunde hoppa 3, sedan 3½ fot från marken.
"Det var när vi insåg att roboten var i vissa avseenden, högre prestanda än andra fyrbenta robotar som används i forskning, även om det var väldigt låg kostnad, " mindes Kau.
Sedan dess, eleverna har lärt Stanford Doggo att göra en backflip – men alltid på stoppning för att möjliggöra snabba försök och felexperiment.
Vad ska Stanford Doggo göra härnäst?
Om dessa elever har det som de vill, framtiden för Stanford Doggo i händerna på massorna.
"Vi hoppas kunna tillhandahålla ett baslinjesystem som vem som helst kan bygga, sa Patrick Slade, doktorand i flyg- och astronautik och mentor för Extreme Mobility. "Säga, till exempel, du ville arbeta med sök och räddning; du kan utrusta den med sensorer och skriva kod ovanpå vår som låter den klättra på stenhögar eller gräva genom grottor. Eller så är det att plocka upp saker med en arm eller att bära ett paket."
Därmed inte sagt att de inte fortsätter sitt eget arbete. Extreme Mobility samarbetar med Zachary Manchesters Robotic Exploration Lab, biträdande professor i flyg- och astronautik, att testa nya styrsystem på en andra Stanford Doggo. Teamet har också konstruerat en robot som är dubbelt så stor som Stanford Doggo som kan bära cirka 6 kilo utrustning. Dess namn är Stanford Woofer.














