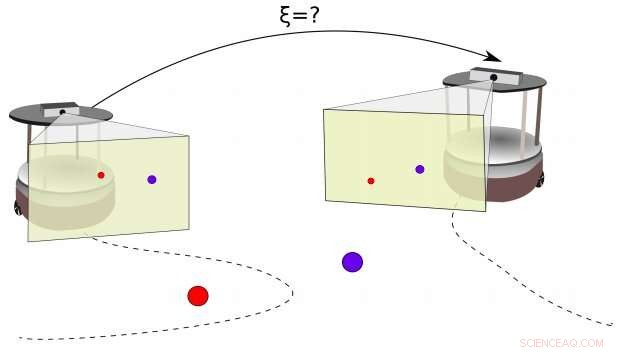
En representation av problemet som tas upp i den senaste studien. Två robotar observerar ett par 3D -punkter. Forskarna föreslår en pipeline för att samtidigt uppskatta 3D -djupet för de två 3D -punkterna och samtidigt få sin relativa pose. Upphovsman:Rodrigues et al.
Forskare vid University of Porto i Portugal och KTH Royal Institute of Technology i Sverige har nyligen utvecklat ett ramverk som kan uppskatta djupet och relativa ställningen för två markrobotar som samarbetar på en given uppgift. Deras ramar, beskrivs i ett papper som för publicerats på arXiv, kan bidra till att förbättra prestanda för flera robotar i uppgifter som innefattar prospektering, manipulation, rapportering, provtagning och patrullering, liksom i sök- och räddningsuppdrag.
Under de senaste åren har forskare har genomfört ett växande antal studier som syftar till att utveckla lösningar för att effektivt samordna flera robotar inom en decentraliserad arkitektur. För att effektivt hantera en given uppgift som en grupp, enskilda robotar i en svärm eller formation bör åtminstone delvis vara medvetna om posen hos andra agenter i sin omgivning.
Denna pose-relaterade data, känd som relativ poseinformation, tillåter en agent att optimera funktionen för ett givet mål, planera om dess banor och undvika kollisioner med andra robotar. I vissa verkliga miljöer, dock, det kan vara svårt för agenter att uppnå exakta relativa uppskattningar. Till exempel, under extrema uppdrag i avlägsna eller avskilda områden, robotar kan stöta på problem med kommunikationskanaler och med hög precision positionering eller rörelseupptagningssystem.
Med detta i åtanke, forskargruppen från University of Porto och KTH satte sig för att utveckla ett ramverk som skulle kunna förbättra 3D-djupuppskattningen och relativa uppskattningar av markrobotar som arbetar tillsammans mot ett gemensamt mål. De fokuserade specifikt på ett scenario där två autonoma markfordon navigerar i en okänd miljö, båda utrustade med perspektivkameror.
Pipeline av den ram som forskarna föreslog. Upphovsman:Rodrigues et al.
"Djupuppskattningsproblemet syftar till att återställa 3D-informationen från miljön, "förklarar forskarna i sitt papper." Det relativa lokaliseringsproblemet består av att uppskatta den relativa posen mellan två robotar, genom att känna varandras pose eller dela information om den upplevda miljön. "
De flesta befintliga lösningar för djupuppskattning och relativ lokalisering i robotar fungerar genom att analysera en frånkopplad uppsättning data, utan att ta hänsyn till händelsernas kronologiska ordning. Den metod som forskarna föreslog, å andra sidan, överväger information som samlats in av de två robotarna individuellt via sina kameror och kombinerar sedan detta för att beräkna den relativa ställningen mellan dem. Djupuppskattningsinformation som samlats in av de två agenterna och inmatningskommandon matas till ett Extended Kalman Filter (EKF), som är utformad för att bearbeta dessa data och uppskatta den relativa positionen mellan robotarna.
"Medan tidigare lösningar för detta problem överväger en uppsättning av två eller flera bilder från miljön eller använder någon speciell flotta-konfiguration (t.ex. robotarna befinner sig i varandras synfält eller har förmågan att känna av bärinformationen om varandras positioner), vi föreslår en ram som delar en uppsättning gemensamma observationer av miljön i respektive lokal ram för varje robot (3D-punktsfunktioner används), "skriver forskarna.
Forskarna utvärderade sitt ramverk i en serie simulerade scenarier, med två markrobotar som kallas TurtleBots. Deras resultat tyder på att deras tillvägagångssätt faktiskt möjliggör effektiv djupuppskattning och relativ lokalisering för två robotar som samarbetar om en uppgift. I deras framtida arbete, forskarna planerar att också överväga den aktiva kontrollen av två robotar i samma scenario som undersöktes i deras senaste studie, liksom andra aspekter som är relevanta för deras samordning.
© 2019 Science X Network