Drönarna utforskar miljön genom att flyga åt olika håll. När en drönare märker en annan drönare i sin önskade riktning, det kommer att försöka flyga i en annan riktning. När detta inte är möjligt (som på denna bild), dronerna med lägre prioritet kommer att gå ur vägen för de högre prioriterade drönarna. Drönare hanterar hinder i farten, och genom att gå in och ut från olika rum. Kredit:TU Delft/ MAVLab
Forskare har presenterat en svärm av små drönare som kan utforska okända miljöer helt själva. Detta jobb, presenteras i Science Robotics den 23 oktober, är ett viktigt steg inom området svärmrobotik. Utmaningen kommer från det faktum att de små 33-gram-drönarna behöver navigera autonomt samtidigt som de har extremt begränsade avkännings- och beräkningsmöjligheter. Den gemensamma forskargruppen - med forskare från TU Delft, University of Liverpool och Radboud University i Nijmegen - tacklade denna utmaning genom att hämta inspiration från insektsnavigeringens relativa enkelhet.
Inspiration från naturen
Insektsvärmar har inspirerat robotister att tro att små robotar också kan övervinna sina individuella begränsningar genom att arbeta i en svärm. Svärmar av små och billiga robotar skulle kunna utföra uppgifter som för närvarande är utom räckhåll för stora, enskilda robotar. Till exempel, en svärm av små flygande drönare skulle kunna utforska en katastrofplats mycket snabbare än en enda större drönare. Sådana svärmar har inte förverkligats än.
Sök och rädda
Under de senaste fyra åren har ett gemensamt forskargrupp vid universiteten i TU Delft, University of Liverpool, och Radboud universitet i Nijmegen, finansierad av den nederländska nationella vetenskapsstiftelsen NWO Natural Artificial Intelligence -programmet, har strävat efter att designa en svärm av små drönare som kan utforska okända miljöer. Målet med forskningsprojektet var att ta steg mot att använda svärmar av drönare i sök-och-räddningsscenarier.
Huvudidén var att i framtiden, räddningsarbetare kommer att kunna släppa en svärm av små drönare för att utforska en katastrofplats som en byggnad som håller på att kollapsa. Swarm av drönare kommer in i byggnaden, utforska det, och kom tillbaka till basstationen med relevant information. Räddningsarbetarna kan sedan fokusera sina insatser på de mest relevanta områdena - t.ex. där det fortfarande finns människor inuti.

Den lilla drönaren passar in i handflatan och väger 33 gram. Tillsammans med de andra drönarna i en svärm, den kan snabbt utforska en obemannad miljö. Kredit:TU Delft/ MAVLab
Att hitta offer
I projektet utrustades små drönare med kameror och skickades ut i en inomhusmiljö för att hitta två dummies som representerar offer i ett katastrofscenario. Denna proof-of-concept sök-och-räddningsuppgift visade tydligt fördelen med att ha en svärm. Inom sex minuter, en svärm av sex drönare kunde utforska cirka 80 procent av de öppna rummen, vilket skulle vara omöjligt för en av drönarna ensamma. Vidare, svärmning visade sig också vara användbart för redundans. En drönare hittade ett offer, men på grund av ett maskinvarufel på kameran, det kunde inte ta tillbaka några bilder. Lyckligtvis, en annan drönare fångade offret på kameran, också.
Utmaning
"Den största utmaningen för att uppnå svärmutforskning ligger på nivån av drönarnas individuella intelligens, "säger Kimberly McGuire, doktorand student som har genomfört projektet. "I början av projektet vi fokuserade på att uppnå grundläggande flygfunktioner som att kontrollera hastigheten och undvika hinder. Efter det, vi utformade en metod för de små drönarna att upptäcka och undvika varandra. Vi löste detta genom att låta varje drönare bära ett trådlöst kommunikationschip och sedan använda signalstyrkan mellan dessa marker - det här är som antalet staplar som visas på din telefon som minskar när du går bort från din WiFi -router i ditt hem. De främsta fördelarna med denna metod är att den inte kräver extra hårdvara på drönaren och att den kräver väldigt få beräkningar. "
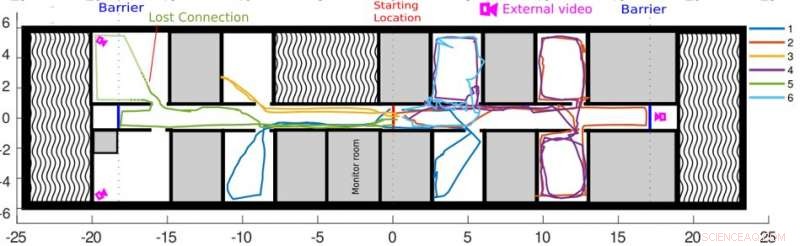
Banor av 6 små drönare som utforskar ett helt kontorsgolv på mindre än 6 minuter. Drönarna flyger först bort från basstationen vid startplatsen i mitten, utforska de öppna rummen, och slutligen återvända till basstationen Kredit:TU Delft/ MAVLab
Autonom navigering
Den mest skrämmande utmaningen i vägen för svärmutforskning, är svårigheten att få små robotar att själva navigera i en okänd miljö. Anledningen till detta är att små robotar är mycket begränsade när det gäller avkänning och beräkning.
På nytt, naturen gav viktig inspiration. Insekter gör inte mycket detaljerade kartor. Istället, de behåller landmärken och beteendemässigt relevanta platser som matkällor och deras bo. "Huvudidén bakom den nya navigationsmetoden är att minska våra navigationsförväntningar till det yttersta:vi kräver bara att robotarna kan navigera tillbaka till basstationen, "säger Guido de Croon, huvudutredare för projektet. "Robotsvärmen sprider sig först ut i miljön genom att varje robot följer en annan önskad riktning. Efter att ha utforskat, robotarna återvänder till en trådlös fyr som ligger vid basstationen. "
Bug -algoritm
"Den föreslagna navigationsmetoden är en ny typ av buggalgoritm, "tillägger Kimberly McGuire." Buggalgoritmer gör inte kartor över miljön utan hanterar hinder i farten. I princip, detaljerade kartor är mycket praktiska, eftersom de tillåter en robot att navigera från valfri punkt på kartan till någon annan punkt, längs en optimal väg. Dock, kostnaderna för att göra en sådan karta på små robotar är oöverkomliga. Den föreslagna buggalgoritmen leder till mindre effektiva vägar men har förtjänsten att den till och med kan implementeras på små robotar. "