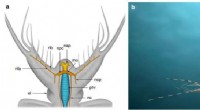
Den nya "växande roboten" kan programmeras att växa, eller förlänga, åt olika håll, baserat på sekvensen av kedjeenheter som låses och matas ut från "växande spets, ” eller växellåda. Kredit:Massachusetts Institute of Technology
I dagens fabriker och lager, det är inte ovanligt att se robotar som susar omkring, transport av föremål eller verktyg från en station till en annan. För det mesta, robotar navigerar ganska enkelt över öppna layouter. Men de har mycket svårare att slingra sig genom trånga utrymmen för att utföra uppgifter som att sträcka sig efter en produkt på baksidan av en rörig hylla, eller slingrande runt en bils motordelar för att skruva av ett oljelock.
Nu har MIT-ingenjörer utvecklat en robot designad för att förlänga ett kedjeliknande bihang som är tillräckligt flexibelt för att vrida och vända i alla nödvändiga konfigurationer, men ändå styv nog att bära tunga belastningar eller applicera vridmoment för att montera delar i trånga utrymmen. När uppgiften är klar, roboten kan dra tillbaka bihanget och förlänga det igen, i en annan längd och form, för att passa nästa uppgift.
Bihangets design är inspirerad av hur växter växer, som innebär transport av näringsämnen, i fluidiserad form, upp till växtens spets. Där, de omvandlas till fast material för att producera, bit för bit, en stödjande stam.
Likaså, roboten består av en "växtpunkt, " eller växellåda, som drar in en lös kedja av låsande block i lådan. Kugghjul i lådan låser sedan ihop kedjeenheterna och matar ut kedjan, enhet för enhet, som ett styvt bihang.
Forskarna presenterade den växtinspirerade "växande roboten" denna vecka vid IEEE International Conference on Intelligent Robots and Systems (IROS) i Macau. De föreställer sig att gripare, kameror, och andra sensorer kan monteras på robotens växellåda, gör det möjligt för den att slingra sig genom ett flygplans framdrivningssystem och dra åt en lös skruv, eller att sträcka sig in i en hylla och ta tag i en produkt utan att störa organisationen av omgivande lager, bland andra uppgifter.
"Tänk på att byta olja i din bil, säger Harry Asada, professor i maskinteknik vid MIT. "När du har öppnat motortaket, du måste vara tillräckligt flexibel för att göra skarpa svängar, vänster och höger, för att komma till oljefiltret, och då måste du vara stark nog att vrida oljefilterlocket för att ta bort det."
"Nu har vi en robot som potentiellt kan utföra sådana uppgifter, " säger Tongxi Yan, en före detta doktorand i Asadas labb, som ledde arbetet. "Det kan växa, dra tillbaka, och växa igen till en annan form, att anpassa sig till sin miljö."
I teamet ingår också MIT-studenten Emily Kamienski och gästforskaren Seiichi Teshigawara, som presenterade resultatet på konferensen.
Sista foten
Designen av den nya roboten är en utlöpare av Asadas arbete med att ta itu med "sista enfotsproblemet" - en teknisk term som hänvisar till det sista steget, eller fot, av en robots uppgift eller utforskande uppdrag. Medan en robot kan tillbringa större delen av sin tid på att korsa öppna ytor, den sista foten av sitt uppdrag kan innebära smidigare navigering genom tightare, mer komplexa utrymmen för att slutföra en uppgift.
Ingenjörer har tagit fram olika koncept och prototyper för att ta itu med det sista enfotsproblemet, inklusive robotar gjorda av mjuka, ballongliknande material som växer som rankor för att pressa sig genom smala springor. Men Asada säger att sådana mjuka utdragbara robotar inte är tillräckligt robusta för att stödja "sluteffektorer, " eller tillägg som gripdon, kameror, och andra sensorer som skulle behövas för att utföra en uppgift, när roboten har avmaskat sig fram till sin destination.
"Vår lösning är faktiskt inte mjuk, men en smart användning av styva material, säger Asada, som är Ford Foundation Professor of Engineering.
Kedjelänkar
När teamet väl definierade de allmänna funktionella delarna av växttillväxt, de försökte härma detta i en allmän mening, i en utdragbar robot.
"Förverkligandet av roboten är helt annorlunda än en riktig växt, men den uppvisar samma typ av funktionalitet, på en viss abstrakt nivå, " säger Asada.
Forskarna designade en växellåda för att representera robotens "växande tips, "liknar knopp av en växt, var, när mer näringsämnen flödar upp till platsen, spetsen matar ut styvare skaft. Inuti lådan, de passar ett system av växlar och motorer, som arbetar för att dra upp ett fluidiserat material - i det här fallet, en böjig sekvens av 3-D-tryckta plastenheter som är sammankopplade med varandra, liknar en cykelkedja.
När kedjan matas in i lådan, den vänder sig om en vinsch, som matar den genom en andra uppsättning motorer programmerade att låsa vissa enheter i kedjan till deras närliggande enheter, skapar ett styvt bihang när det matas ut ur lådan.
Forskarna kan programmera roboten att låsa ihop vissa enheter samtidigt som de lämnar andra olåsta, att forma specifika former, eller att "växa" åt vissa håll. I experiment, de kunde programmera roboten att vända ett hinder när det sträckte sig eller växte ut från sin bas.
"Den kan låsas på olika ställen för att vara böjd på olika sätt, och har ett brett utbud av rörelser, " säger Yan.
När kedjan är låst och stel, den är stark nog att stödja en tung, ett pund vikt. Om en gripare var fäst vid robotens växande spets, eller växellåda, forskarna säger att roboten potentiellt kan växa tillräckligt länge för att slingra sig genom ett smalt utrymme, applicera sedan tillräckligt med vridmoment för att lossa en bult eller skruva av ett lock.
Autounderhåll är ett bra exempel på uppgifter som roboten kan hjälpa till med, enligt Kamienski. "Utrymmet under huven är relativt öppet, men det är den sista biten där du måste navigera runt ett motorblock eller något för att komma till oljefiltret, att en fast arm inte skulle kunna navigera runt. Den här roboten skulle kunna göra något sådant."