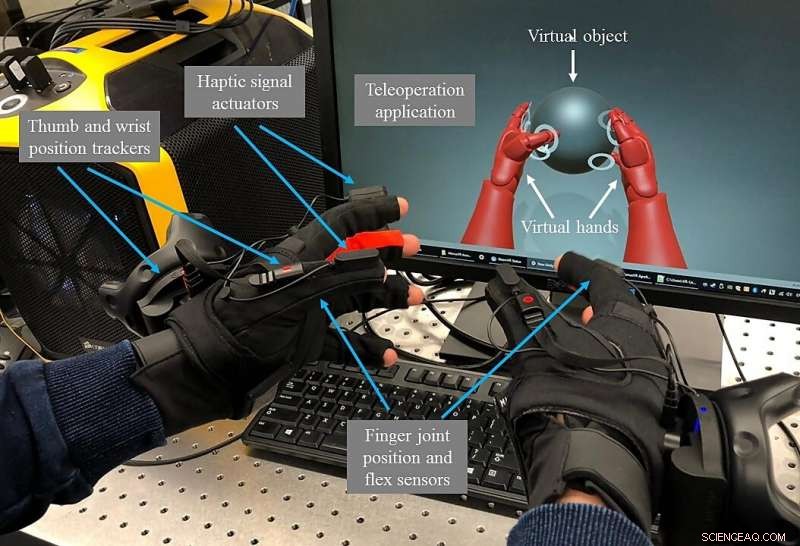
Experimentell installation som visar applikationer mellan människor. Upphovsman:S. Mondal, et al., University of Melbourne
Ett taktilt internet är potentiellt nästa fas av sakernas internet, där människor kan beröra och interagera med avlägsna eller virtuella objekt medan de upplever realistisk haptisk feedback.
Ett team av forskare under ledning av Elaine Wong vid University of Melbourne, Australien, utvecklat en metod för att förbättra haptiska feedbackupplevelser i applikationer mellan människor som är typiska för det taktila Internet. Forskarna tror att deras metod kan användas för att förutsäga korrekt feedback i applikationer som sträcker sig från elektronisk sjukvård till spel med virtual reality.
Wong och hennes kollegor kommer att presentera sin föreslagna modul, som använder ett artificiellt neuralt nätverk för att förutse det rörda materialet, vid konferensen och utställningen för optisk fiberkommunikation (OFC), kommer att hållas 8-12 mars 2020 på San Diego Convention Center, Kalifornien, U.S.A.
Beroende på dynamiken i interaktionen, en optimal applikation mellan människa och maskin kan kräva en nätverkssvarstid så kort som en millisekund.
"Dessa svarstider sätter en gräns för hur långt från varandra människor och maskiner kan placeras, "sa Wong." Därför, lösningar för att koppla bort detta avstånd från nätverkets svarstid är avgörande för att förverkliga det taktila Internet. "
Som ett steg mot detta mål, laget utbildade en förstärkningsinlärningsalgoritm för att gissa lämplig haptisk återkoppling i ett system mellan människa och maskin innan rätt feedback är känd. Modulen, kallad Händelsebaserad HAptic SAmple Forecast (EHASAF), påskyndar processen genom att ge ett beröringssvar baserat på en sannolikhetsförutsägelse av materialet som användaren interagerar med.
"För att underlätta applikationer mellan människor över långdistansnät, vi förlitar oss på artificiell intelligens för att övervinna effekterna av lång förökningstid, "sa Sourav Mondal, en författare på tidningen.
När det faktiska materialet har identifierats, enheten anpassar och uppdaterar sin sannolikhetsfördelning för att hjälpa till att välja rätt feedback framåt.
Gruppen testade EHASAF -modulen med ett par virtual reality -handskar som en människa använde för att röra vid en virtuell boll. Handskarna innehåller sensorer på fingrar och handleder för att upptäcka beröringar och spårrörelser, krafter och handens orientering.
Beroende på vilken materialboll användaren väljer att röra vid de fyra virtuella alternativen, återkopplingen från handsken bör variera. Till exempel, en metallkula blir fastare än en skumkula. När ett neuralt nätverk avgör att ett av fingrarna har rört bollen, EHASAF -modulen börjar cykla genom feedbackalternativ för att generera tills den löser det faktiska materialet i den valda bollen.
För närvarande, med fyra material, modulens förutsägelsesnoggrannhet är cirka 97%.
"Vi tror att det är möjligt att förbättra förutsägelsens noggrannhet med ett större antal material, "sa Mondal." Men mer sofistikerade artificiella intelligensbaserade modeller behövs för att uppnå det. "
"Fler och mer sofistikerade modeller med förbättrad prestanda kan utvecklas baserat på den grundläggande idén med vår föreslagna EHSAF -modul, "Sa Mondal.
Dessa resultat och ytterligare forskning kommer att presenteras på plats vid OFC 2020.