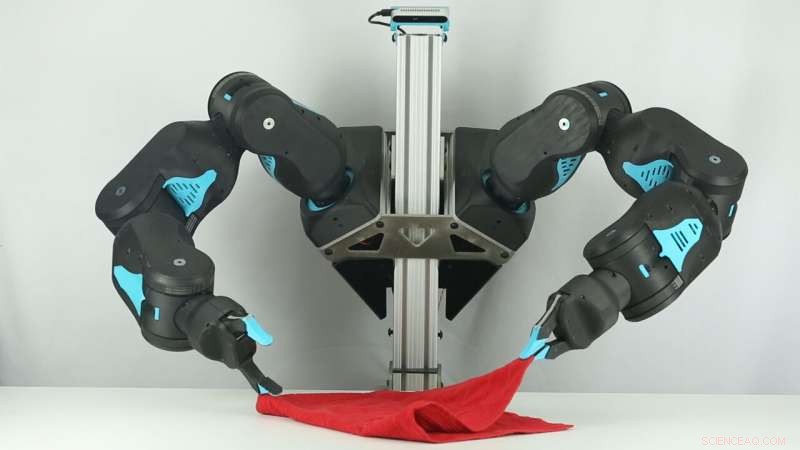
Blue robotens armar - ungefär lika stora som en mänsklig kroppsbyggares - designades för att dra nytta av de senaste framstegen inom artificiell intelligens för att bemästra intrikat, människocentrerade uppgifter, som hopfällbara handdukar. Kredit:Philip Downey
Robotar kan ha en förmåga för övermänsklig styrka och precision, men de kämpar fortfarande med några grundläggande mänskliga uppgifter – som att vika tvätt eller göra en kopp kaffe.
Ange blå, en ny lågkostnad, människovänlig robot utformad och byggd av ett team av forskare vid University of California, Berkeley. Blue designades för att använda de senaste framstegen inom artificiell intelligens (AI) och djup förstärkningsinlärning för att bemästra komplicerade mänskliga uppgifter, allt samtidigt som det förblir överkomligt och säkert nog att varje artificiell intelligensforskare – och så småningom alla hem – skulle kunna ha en.
Blue är Pieter Abbeels skapelse, professor i elektroteknik och datavetenskap vid UC Berkeley, postdoktor Stephen McKinley och doktorand David Gealy. Teamet hoppas att Blue ska påskynda utvecklingen av robotteknik för hemmet.
"AI har gjort mycket för befintliga robotar, men vi ville designa en robot som är rätt för AI, " sa Abbeel. "Befintliga robotar är för dyra, inte säkra runt människor och på samma sätt inte säkra runt sig själva – om de lär sig genom försök och misstag, de kommer lätt att bryta sig själva. Vi ville skapa en ny robot som är rätt för AI-åldern snarare än för hög precision, submillimeter, fabriksautomationsålder."
Under de senaste 10 åren, Abbeel har banat väg för algoritmer för inlärning av djup förstärkning som hjälper robotar att lära sig genom att trial and error eller genom att vägledas av en människa som en marionett. Han utvecklade dessa algoritmer med hjälp av robotar byggda av externa företag, som marknadsför dem för tiotusentals dollar.
Blått är hållbart, plastdelar och högpresterande motorer totalt mindre än $5, 000 för att tillverka och montera. Dess armar, var och en ungefär lika stor som en genomsnittlig kroppsbyggare, är känsliga för yttre krafter - som en hand som trycker bort den - och har rundade kanter och minimala klämpunkter för att undvika att fånga vilse fingrar. Blues armar kan vara väldigt stela, som en människa som böjer sig, eller mycket flexibel, som en människa som kopplar av, eller något däremellan.

Blå roboten är hållbar, plastdelar och högpresterande motorer totalt mindre än $5, 000 för att tillverka och montera. Här visas dess gripdon som håller en växelsats. Kredit:Philip Downey
För närvarande, teamet bygger 10 armar internt för att distribuera till utvalda tidiga användare. De fortsätter att undersöka Blues hållbarhet och att tackla den enorma utmaningen att tillverka roboten i större skala, vilket kommer att ske genom UC Berkeley spinoff Berkeley Open Arms. Registreringar för att uttrycka intresse för prioriterad åtkomst börjar idag på den webbplatsen,
"Med en billigare robot, varje forskare kan ha sin egen robot, och den visionen är en av de främsta drivkrafterna bakom detta projekt – att få mer forskning gjord genom att ha fler robotar i världen, " sa McKinley.
Från att flytta staty till smidig som en katt
Robotik har traditionellt fokuserat på industriella tillämpningar, där robotar behöver styrka och precision för att utföra repetitiva uppgifter perfekt varje gång. Dessa robotar blomstrar i mycket strukturerade, förutsägbara miljöer – långt ifrån det traditionella amerikanska hemmet, där du kan hitta barn, husdjur och smutstvätt på golvet.
"Vi har ofta beskrivit dessa industrirobotar som rörliga statyer, " sa Gealy. "De är väldigt stela, menad att gå från punkt A till punkt B och tillbaka till punkt A perfekt. Men om du befaller dem att gå en centimeter förbi ett bord eller en vägg, de kommer att slå in i väggen och låsa in, bryta sig själva eller bryta muren. Inget bra."
Om en AI ska göra misstag och lära sig genom att göra i ostrukturerade miljöer, dessa stela robotar fungerar helt enkelt inte. För att göra experiment säkrare, Blue designades för att vara kraftkontrollerad - mycket känslig för yttre krafter, modulerar alltid mängden kraft den utövar vid varje given tidpunkt.
"En av de saker som är riktigt coola med designen av den här roboten är att vi kan göra den kraftkänslig, trevlig och reaktiv, eller så kan vi välja att den ska vara väldigt stark och väldigt stel, " Sa Gealy. "Forskare kan justera hur styv roboten är, och vilken typ av stelhet – vill du att det ska kännas som melass? Vill du att det ska kännas som en vår? En kombination av dessa? Om vi vill att robotar ska röra sig mot hemmet och prestera i dessa alltmer ostrukturerade miljöer, de kommer att behöva den förmågan."
För att uppnå dessa möjligheter till låg kostnad, teamet övervägde vilka funktioner Blue behövde för att utföra mänskliga centrerade uppgifter, och vad det kunde gå utan. Till exempel, forskarna gav Blue ett brett rörelseområde - den har leder som kan röra sig i samma riktningar som en mänsklig axel, armbåge och handled – för att göra det möjligt för människor att lättare lära den hur man genomför knepiga manövrar med hjälp av virtuell verklighet. Men de smidiga robotarmarna saknar en del av styrkan och precisionen hos en typisk robot.
"Vad vi insåg var att du inte behöver en robot som utövar en specifik kraft för all tid, eller en specifik noggrannhet för alla tider. Med lite intelligens, du kan lätta på dessa krav och låta roboten bete sig mer som en människa för att uppnå dessa uppgifter, " sa McKinley.
Blue kan kontinuerligt hålla upp 2 kg vikt med armarna helt utsträckta. Men till skillnad från traditionella robotkonstruktioner som kännetecknas av en konsekvent "kraft/strömgräns, " Blå är designad för att vara "termiskt begränsad, " sa McKinley. Det betyder att, liknar en människa, den kan utöva en kraft långt över 2 kilogram i en snabb skur, tills dess termiska gränser nås och den behöver tid att vila eller svalna. Det här är precis som hur en människa kan plocka upp en tvättkorg och enkelt bära den över ett rum, men kanske inte kan bära samma tvättkorg över en mil utan frekventa pauser.
"Väsentligen, vi kan få ut mer av en svagare robot." Sa Gealy. "Och en svagare robot är bara säkrare. Den starkaste roboten är farligast. Vi ville designa den svagaste roboten som fortfarande kunde göra riktigt användbara saker."
"Forskare hade utvecklat AI för befintlig hårdvara och, för ungefär tre år sedan, vi började tänka, "Kanske vi kunde göra något tvärtom. Vi kanske kan tänka på vilken hårdvara vi kan bygga för att utöka AI och arbeta på de två vägarna tillsammans, på samma gång, "" sa McKinley. "Och jag tror att det är en riktigt dramatisk förändring från hur mycket forskning har ägt rum."