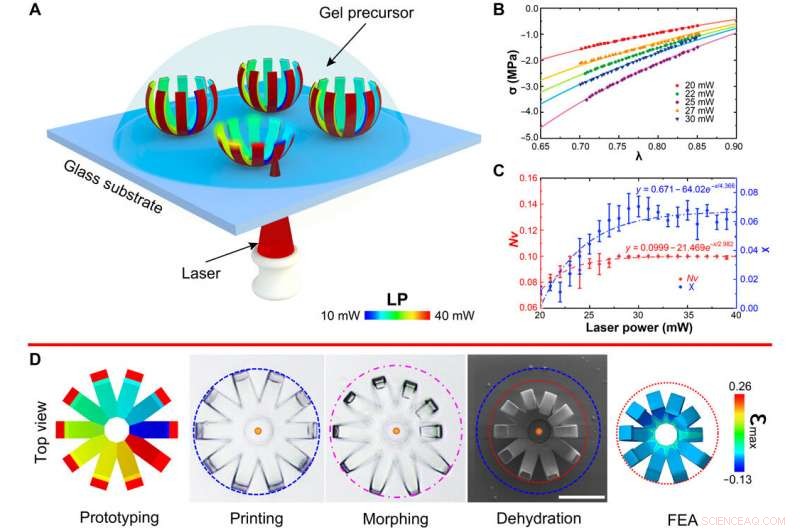
Spatial och temporal kontroll i direkt laserskrivning för att möjliggöra rumsligt kontrollerade differentiellt tvärbundna polymernätverk. (A) Schematisk över utskriftsprocessen med ett DLW-system. Färgfältet för lasereffekten (LP) sträcker sig från 10 till 40 mW. (B) Mekaniska egenskaper hos det tryckta materialet med varierande lasereffekt, där σ anger den nominella kompressionsspänningen och λ är motsvarande sträckningsförhållande. (C) Effekt av laserkraft på tvärbindningsdensiteten Nv och Flory-interaktionsparametern (χ). (D) Blomliknande mikrostruktur med programmerad lyhördhet för att visa kontrollerbar deformation. De yttre (passiva) skikten av alla kronblad trycktes med en lasereffekt på 40 mW och med en skanningshastighet på 8 mm/s; det inre (aktiva) lagret av varje kronblad trycktes med samma hastighet men med gradvis ökad laserkraft. Efter fullständig uttorkning, de transformerade kronbladen uppvisade samma böjningskurvatur som de som förutspåddes av FEA. Skalstång, 40 μm. Kredit:Science Advances, doi:10.1126/sciadv.aav8219
Fyrdimensionell (4-D) utskrift är baserad på sammanslagning av multimaterialtryck, förstärkningsmönster eller mikro- och nanofibrösa tillsatser som tidsrelaterade programmerbara verktyg, för att uppnå önskade formomkonfigurationer. Dock, de befintliga programmeringsmetoderna följer fortfarande en origami-designprincip för att generera omkonfigurerbara strukturer med självvikning och staplade 2D-material i små skalor. I en ny rapport om Vetenskapens framsteg , T. Y. Huang och ett team av tvärvetenskapliga, internationella forskare i USA och Kina föreslog en programmerbar modulär design för att direkt konstruera 3-D omkonfigurerbara mikrostrukturer som kan 3-D-till-3-D-transformationer via 4-D-mikrobyggblocksmontering.
Forskarna använde 4-D direkt laserskrivning för att skriva ut tvåfotonpolymeriserbara och stimulikänsliga hydrogeler som byggmaterial och konstruerade byggstenarna i mikrometerskala. Teamet introducerade Denavit-Hartenberg (DH) parametrar som vanligtvis används för att definiera robotarms kinematik (rörelse) som en riktlinje för att montera mikrobyggstenar och planera 3D-rörelsen hos monterade kedjeblock. De 3-D-printade också en transformator i mikroskala för att ändra form från en racerbil till en humanoid robot (ungefär som filmen ännu i småskalig och i sur lösning) för att styra rörelsen av en mängd olika sammansatta fack för första gången i labbet.
Shape-morphing-system har omfattande tillämpningar inom kamouflage, som mjuka robotaktuatorer och i biomedicinska apparater för att koordinera maskiner och deras miljöer. Forskare kan använda datorbaserade origamidesigner som standard 2D-materialplattformar för att konstruera koordinerad själv-morphing (självformning), 3-D morphing maskiner. Self-shaping är en unik och kraftfull teknik som används för att konstruera småskaliga maskiner för trådlös formförändringsaktivering, utan att vara beroende av manuella monteringsprocesser. Materialforskare hade också programmerat formtransformationer inom 2D-material genom att introducera fibrösa mikro- och nanoarkitekturer för att skapa stimuli-känsliga geler eller formminnespolymerer. De senaste framstegen inom 3-D-utskrift har bekvämt gjort det möjligt för forskare att direkt skriva ut maskiner med rumsligt kontrollerade mekaniska egenskaper. Dock, befintliga toppmoderna 3D-morphingmaskiner förlitar sig fortfarande på 3D-utskrift som är baserad på en mall av plana 2D självvikande origamimotsvarigheter.

Modulärt morphingsystem bestående av 60 byggstenar kodade till rullformer vid exponering för syra. Kredit:Science Advances, doi:10.1126/sciadv.aav8219
En programmerbar designteknik för att framgångsrikt bilda 3-D-till-3-D-formtransformationer är begränsad på grund av den ökade beräkningskomplexiteten som krävs för att designa en sådan arkitektur. Hittills har forskare förlitat sig på finita elementanalys (FEA) för att simulera formtransformationer av direkta 3D-tryckta strukturer, dock, processen är tidskrävande med ökande 3D-strukturell komplexitet. Även om det är möjligt att designa flera algoritmer för att automatiskt generera designsammansättningen och rörelsen i modulära robotar, konceptet kan inte tillämpas på småskaliga maskiner.
I detta arbete, Huang et al. därför föreslog en programmerbar morphing modulär (anpassad) design, inspirerad av modulär robotik och LEGO-liknande byggklossar. Teamet underlättade designen av komplexa 3-D-till-3-D-formtransformationer med hjälp av direkta 3-D-tryckta mikrostrukturer. De använde 4-D direkt laserskrivning (4-D DLW) vid submikronupplösning för att bygga en mängd olika mikroskaliga formformande byggstenar, styrs via laserdosering, för att hjälpa övergången. Vid sidan av laserskrivning för modulär design, forskarna fångade framåt och invers kinematik med hjälp av DH (Denavit-Hartenberg) parametrar och introducerade FEA för att kvantitativt studera deformationen av byggstenar. DH-parametrarna gjorde det också möjligt för dem att sätta samman rörelser av 3-D-avdelningar för komplexa 3-D-till-3-D-transformationer genom att minska beräkningsbelastningen.
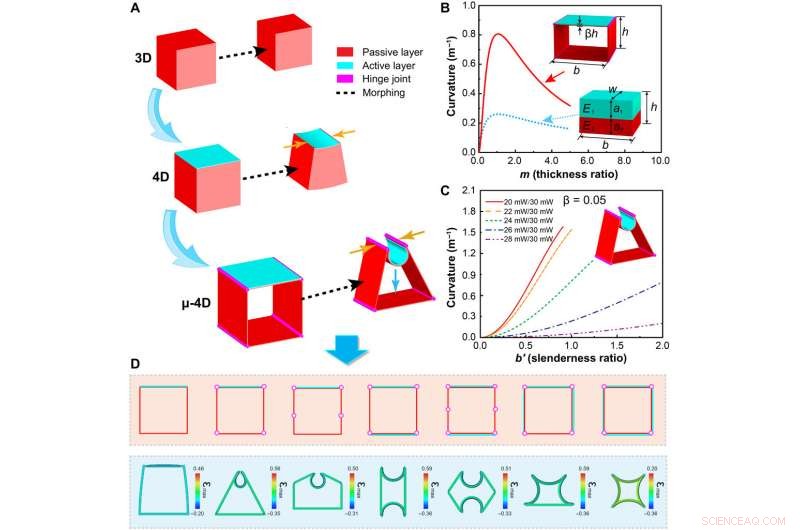
Utveckling av 3D-printade byggstenar. (A) 4D-mikrobyggstenar utvecklas från konventionella statiska 3D-tryckta byggstenar till deformerbara byggstenar och vidare till ledade byggstenar på grund av utvecklingen av aktiva material och mikrobearbetningstekniker. Krympningen av det aktiva skiktet driver huvudsakligen deformationen under minskning av lösningsmedlets pH, vilket gör att dubbelskiktsstrukturerna böjer sig mot det aktiva lagret. (B) Effekt av tjockleksförhållandet mellan det aktiva skiktet och det passiva skiktet (m) på böjningskurvaturen (κ), vilket indikerar att de ledade byggstenarna deformeras mer än konventionella tvåskiktsbyggstenar. (C) Böjkurvatur för de ledade byggstenarna finjusterad genom att variera slankhetsförhållandet (b′) mellan blockens bredd och höjd och laserparametrarna mellan de aktiva och passiva lagren. (D) Olika simulerade formtransformationslägen för de ledade byggstenarna genom att variera det rumsliga arrangemanget av dubbelskiktsmekanismerna och de eftergivliga gångjärnslederna. Kredit:Science Advances, doi:10.1126/sciadv.aav8219
4-D-utskrift förlitar sig till stor del på matematik för att hantera sofistikerade framåt- och inversproblem och dess framgång beror på noggrannheten hos beräkningsmodeller i förhållande till experimentresultaten. Eftersom FEA bjuder in en stor beräkningsbelastning, Huang et al. föreslog en modulär design för att rekonstruera en stor och komplicerad 3D-struktur och dess formtransformation med hjälp av små och diskretiserade byggstenar för vilka de introducerade FEA baserat på Flory-teorin för att studera deformationen av varje byggsten. Forskarna genomförde mikromekaniska kompressionstester i en alkalisk lösning för att karakterisera spännings- och töjningsförhållandet hos de polymeriserade gelerna som en funktion av laserkraft.
Efter att ha karaktäriserat materialet, Huang et al. genomförde en finita element-simulering baserad på den kommersiella programvaran Abaqus för att förutsäga formutvecklingen av 3-D-strukturer med varierande kemisk potential. För att initialt verifiera riktigheten av FEA-förutsägelsen, de bildade en mikroblomma som innehöll 10 tvåskiktsliknande kronblad var och en kodade med olika laserdoser för att tillåta olika morphing-kurvaturer att svälla och krympa i olika miljöer. Den tryckta strukturen krympte avsevärt i sura lösningar - den dominerande drivkraften som underlättar deformation i tryckta byggstenar.
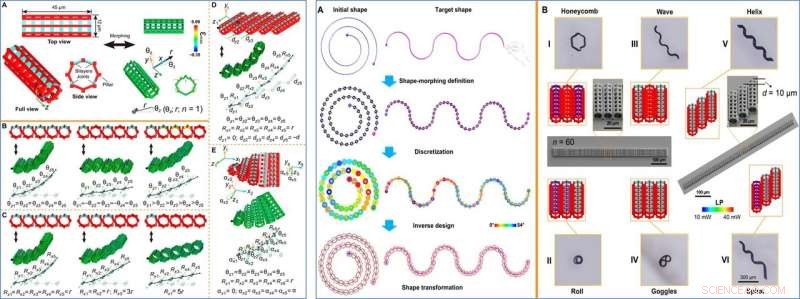
VÄNSTER:Designprincip och monteringsregler för det modulära systemet med hjälp av finita element-simuleringar. (A) Schema och designgeometri för de ledade byggstenarna vars grundstruktur är en åttakantig prismatisk ihålig cylinder som består av par av aktiva lager, passiva lager, och gångjärnsförband. (B) Rotationsdeformation inducerad av krympningen av de aktiva skikten. Varje byggsten kan ses som en kombination av en rotationsfog och en styv stång, som liknar en robotarm. (C till E) Schema för rotationsrörelser med kontrollerad amplitud och orientering möjlig genom montering av olika förprogrammerade byggstenar. (B), (C), (D), och (E) definiera hur de fyra DH-parametrarna θ, R, d, och α är implementerade i våra modulära byggstenar, respektive. FEA tillhandahåller ett sätt för den kvantitativa sammansättningen av det komplexa modulära systemet. HÖGER:Inverterad och framåtriktad design av morphing modulära system. (A) Omvänd problemsökning för att programmera en struktur som förvandlas till önskad form. Med tanke på en godtycklig form, som en våg, den modulära designen omvandlar den till en diskret motsvarighet med ett begränsat antal leder och erhåller sedan DH-parametrarna. Det modulära systemet konstruerar därefter formtransformationen mellan den givna vågformen och en sammansatt valskonfiguration genom att koda in den omvända θz i rullen, för att det ska förvandlas till formen av en våg. I bilden av den omvända designen av en rulle kodad med olika färger, de heldragna cirklarna indikerar att θz är positivt, och de ihåliga cirklarna indikerar att θz är negativ. (B) Optiska bilder av de sammansatta byggstenarna kodade med olika DH-parametrar. Kredit:Science Advances, doi:10.1126/sciadv.aav8219
Huang et al. sedan representerade 4-D byggstenarna som kubiska celler med en dubbelskiktskonfiguration innehållande aktiva och passiva material. De beräknade bindningskurvaturen för de formulerade mikrobyggstenarna, finjusteras av deras slankhetsförhållande och laserkraft på det aktiva lagret. För att montera och planera rörelsen av det modulära systemet, Huang et al. beaktade den totala strukturella styvheten, monteringsfrihet och programmerbarhet för 4-D mikrobyggstenar. De åstadkom detta med hjälp av en åttakantig prismatisk mikrocylinder som den grundläggande byggstenen för att konstruera ett större och mer komplicerat morphing-modulsystem.
Forskarna observerade självmontering av flera byggstenar för att likna en robotarm som genererar de önskade 3D-rörelserna, vilket de uppskattade med hjälp av FEA och resultaten stämde väl överens med experimenten. Dock, FEA kunde inte fånga rörelsekomplexitet genererad av ett större antal byggstenar (n> 60). För att ta itu med detta, Huang et al. introducerade DH-parametrar (Denavit-Hartenberg) med endast fyra fysiska parametrar i en sluten analytisk form för att beräkna formtransformationer av en robotarm som innehåller flera leder och stela stänger. Dessa parametrar bestämde 3D-transformationerna och monteringsreglerna för det föreslagna modulära systemet.
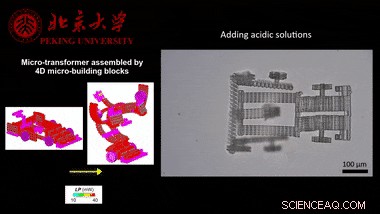
Mikrotransformator sammansatt av 4-D mikrobyggklossar. Kredit:Science Advances, doi:10.1126/sciadv.aav8219
I sista hand, forskarna konstruerade en transformator i mikroskala via 3D-montering och 3D-rörelseplanering av 4D-byggnadsblock, skrivs ut med 4-D DLW. Minitransformatorn innehöll fem huvudsakliga funktionssegment, inklusive nacken, axel, vapen, ryggrad och ben, vid sidan av sina kontakter. Huang et al. fångade transformationer av varje fack via en serie DH-parametrar och bildade en unik formförvandlande övergång mellan en racerbil och en mänsklig robot.
Resultatet var en första-i-studie för att skapa en minitransformator som automatiskt ändrade sin form för att stå upp – i labbet. Dock, det är fortfarande utmanande att rationellt designa en transformator som samtidigt förvandlades utan att störa varje komponent för synkroniserad transformation. Medan mikroskalatransformatorn är en extremt förenklad proof-of-princip-konstruktion för sina större motsvarigheter på skärmen, forskare kan konstruera riktiga 4-D-tryckta strukturer med kodad tidsdimension under utskrift för att underlätta omkonfigurerbara konstruktioner och bilda olika fack för att sekventiellt transformera efter önskemål.
På det här sättet, T. Y. Huang och kollegor föreslog en programmerbar modulär design baserad på 4-D mikrobyggblocksmontering för att underlätta komplexa framåt- och omvända problem med 4-D-utskrift. De använde FEA för att förutsäga formutvecklingen för varje byggsten, utan att ta hänsyn till hela strukturen för att märkbart minska beräkningskomplexiteten. Den resulterande mikroskalatransformatorn var kapabel till komplexa 3D-transformationer baserade på fyra DH-parametrar och en enstegs DLW-tillverkningsprocess med hjälp av fotoresponsiva hydrogeler. Huang et al. förutse att den föreslagna modulära designen kommer att bana väg för att underlätta nya konstruktioner av komplex 4-D-utskrift.
© 2020 Science X Network