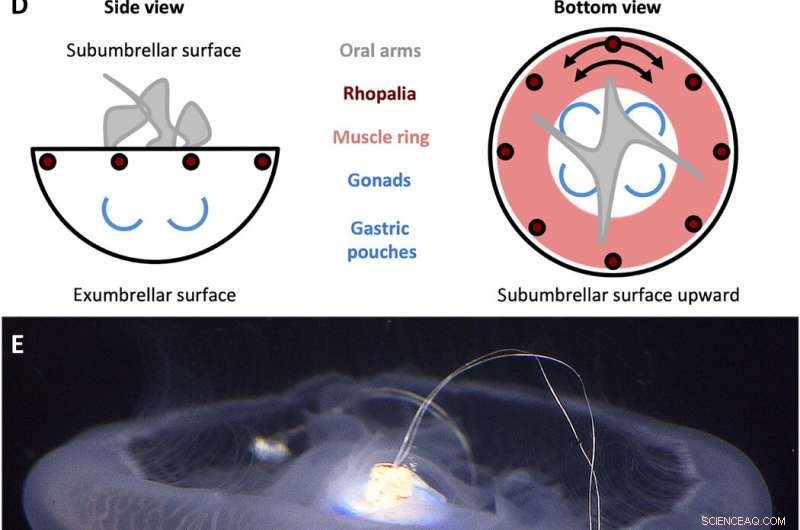
A. aurita simma controller design. (A) Kvadratvågssignal genererad av simkontrollen med en amplitud (A) på 3,7 V och en pulsbredd (T) på 10 ms, inställd på frekvenser (f) på 0,25, 0,38, 0,50, 0,62, 0,75, 0,88, och 1,00 Hz. (B) Simkontrollkomponenter. Huset innehåller (i) en polypropylenlock med en trästift som inbäddas i klockans centrum, och (ii) en plastfilm för att vattentäta huset, både förskjutna med rostfritt stål och korkvikter för att hålla enheten ungefär neutralt flytande. Mikroelektronik inkluderar (iii) en TinyLily-miniprocessor, (iv) litiumpolymerbatteri, och (v) två platina-spetselektroder med lysdioder för visuellt att indikera stimulering. (C) Helt monterad enhet, med processorn och batteriet inneslutna i höljet. (D) Förenklad schema över A. aurita anatomi, markera subumbrellar (överst) och exumbrellar (nedre) ytor, rhopalia, muskelring, och perifer muskelfiberorientering, orala armar, och könskörtlar/magpåsar. (E) Simkontroller (inaktiv) inbäddad i en frisimmande maneter, klockorienterad subumbrellär sida uppåt, med träpinnen införd i manubrium och två elektroder inbäddade i muskeln och mesoglealvävnaden nära klockmarginalen. Fotokrediter för (B), (C), och (E):Nicole W. Xu, Stanford University. Upphovsman:Science Advances, doi:10.1126/sciadv.aaz3194
Forskare inom robotmaterial syftar till att artificiellt kontrollera djurens rörelse för att hantera de befintliga utmaningarna för aktivering, kontroll- och effektkrav inom mjuk robotik. I en ny rapport i Vetenskapliga framsteg , Nicole W. Xu och John O. Dabiri vid avdelningarna för bioingenjör, civil- och miljöteknik och maskinteknik vid Stanford University presenterade en biohybrid -robot som använde mikroelektronik ombord för att framkalla simning i levande maneter. De mätte förmågan att väsentligt förbättra framdrivningen genom att driva kroppssammandragningar vid ett optimalt frekvensområde snabbare än naturligt beteende. Manövern ökade simhastigheten med nästan tre gånger, fast med endast en dubblerad ökning av djurets metaboliska utgifter och 10 mW extern strömförsörjning till mikroelektroniken. Biohybridroboten använde 10 till 1000 gånger mindre extern effekt per massa än med tidigare rapporterade vattenrobotar. Möjligheten kan förbättra prestandaomfånget för biohybridrobotar i förhållande till inbyggd prestanda, med potentiella applikationer som biohybrid havsövervakningsrobotar.
Maneter är en övertygande modellorganism för att bilda energieffektiva undervattensfordon på grund av deras låga transportkostnad (COT). Befintliga biomimetiska robotar av simdjur som helt är byggda av konstruerade material kan uppnå hastigheter som är jämförbara med naturliga djur, men med storleksordningar mindre effektiva än maneter. Biohybrid maneter robotar kan därför integrera levande djur för att hantera befintliga utmaningar med mjuk robotik. Forskare kan använda manetstrukturen för aktivering och lösa effektbehov genom att utforska naturliga matningsbeteenden där de utvinner kemisk energi från byten in situ. Tillvägagångssättet kan också tillåta återhämtning från skador via naturliga sårläkningsprocesser som är inneboende i djuret, kontrollera djurs rörelse och tillåta ytterligare studier av levande organismers biomekanik i användarkontrollerade experiment. I den här studien, Xu och Dabiri använde ett system för mikroelektronik för att externt styra en levande maneter och bilda en biohybrid robot för att främja vetenskap och teknik inom vattenlevande rörelser.
För att aktivera maneter som en naturlig ställning, laget använde djurets egen basalmetabolism för att minska ytterligare effektbehov och utnyttjade dess muskler för aktivering samtidigt som de förlitade sig på självläkande och vävnadsregenererande egenskaper för ökad skadetolerans. Teamet hypoteser att ökande klockkontraktionsfrekvenser för maneter kan öka simhastigheten upp till en gräns. De kontrollerade därför externt frekvensen av pulser hos frisimmande djur genom att mäta simhastigheten och syreintaget för att beräkna transportkostnaden (COT) och testa deras arbetshypotes. Tidigare var sådana undersökningar endast möjliga genom beräknings- eller teoretiska modeller.
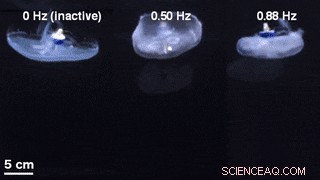
En jämförelse av klockgeometrier för ostimulerad simning med en inaktiv simkontroller inbäddad (vänster) och externt styrd simning vid 0,50 Hz (mitten) och 0,88 Hz (höger). Upphovsman:Science Advances, doi:10.1126/sciadv.aaz3194
Xu et al. valde Aurelia aurita som modellorganism; en oblat art maneter som innehåller en flexibel mesoglealklocka och ett skikt av koronala och radiella muskler som kantar subumbrellärytan. För att simma, organismerna drar ihop muskler för att minska volymen i subumbrellarhålan och mata ut vatten för att ge en drivkraft tillsammans med ytterligare bidrag från återtagande av passiv energi och sugbaserad framdrivning. För att initiera dessa muskelsammandragningar, maneterna aktiverade någon av dess ljusa pacemaker som finns i sensororganen som kallas rhopalia längs klockmarginalen. Dessa nervkluster aktiverade hela det motoriska nervnätet för att orsaka dubbelriktade muskelvågutbredningar som härstammade från de aktiverade pacemakarna under naturlig förökning.
Robotisk designintegration i levande maneter och enhetsvalidering
Forskarna konstruerade först en bärbar, fristående mikroelektronisk simkontroller för att generera en fyrkantig pulsvåg och stimulera muskelsammandragningar från 0,25 Hz till 1,00 Hz. De komponerade styrenheten med en TinyLily-miniprocessor och en 10 mAh litiumpolymercell. För att visuellt bekräfta den elektriska signalen, Xu et al. kopplade ledningarna i serie till TinyLily ljusdioder (lysdioder). De satte sedan in elektroderna bilateralt i subumbrellära vävnaden och höll systemet naturligt flytande med brickor och kork i rostfritt stål. För att bekräfta att simkontrollen externt kunde styra maneternas sammandragningar, forskarna utvecklade en metod för att spåra rörelsen hos klockmarginalen. För detta, de genomförde tre uppsättningar experiment, (1) att observera endogena sammandragningar av organismen i avsaknad av störningar, (2) att observera om mekaniskt inbäddning av inaktiva elektroder påverkade naturligt djurbeteende och (3) att testa stimuleringsprotokoll för att bekräfta externt drivna sammandragningar.
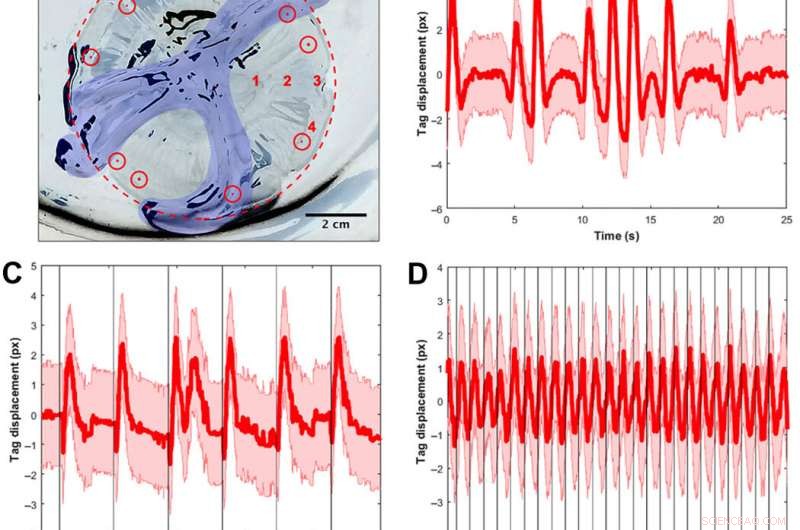
Signalvalidering med hjälp av visuella taggar och frekvensspektra för att spåra muskelsammandragningar. (A) A. aurita medusae (n =10, 8,0 till 10,0 cm i diameter) placerades subumbrellär yta upp i en platta utan havsvatten för begränsade muskelstimuleringsförsök (elektrod visas inte). Bilden är inverterad så att klockan och plattan är vita, och svarta områden är ljusreflektioner från djurvävnad och plattan. För tydlighets skull, klockans marginal skisseras i en röd prickad cirkel, och de orala armarna är färgade i blått. Synliga implantatelastomer -taggar (visas som färgade röda prickar inom röda cirklar) injicerades runt marginalen, och en tagg spårades per video för att beräkna vävnadsförskjutningen som ett surrogat för muskelsammandragningar. Rumsliga tester för att avgöra om elektrodplatsen påverkade spektra utfördes på fyra platser, märkt med röda siffror:(1) intill magsäckarna, (2) mitt emellan magsäckarna och marginalen, (3) vid rhopalia, och (4) vid marginalen bort från rhopalia. Alla andra tester utfördes på plats 2. (B) Exempel på taggförskjutning som en funktion av tiden för ett djur utan någon yttre stimulans. Den röda linjen indikerar centroidförskjutningen, med felet beräknat från att anta en osäkerhet på en halv pixel för att hitta taggen på taggen i varje bild, över 25 s. Observera den tidsmässiga variationen av muskelsammandragningar, inklusive perioder med regelbundna pulser och successiva snabbpulser. (C) Exempel på etikettförskjutning för ett djur med en yttre stimulans på 0,25 Hz, med varje stimulans visualiserad som en vertikal svart linje. Även om sammandragningar regelbundet följer yttre stimuli, naturliga djurpulser förekommer också vid låga frekvenser. Notera, till exempel, dubbelpulsen efter en stimulans (t ≈ 12 s). (D) Exempel taggförskjutning för ett djur med en yttre stimulans på 1,00 Hz, med varje stimulans visualiserad som en vertikal svart linje. Samma tidsfönster (25 s) visas för en rättvis jämförelse med de två föregående tomterna. Sammandragningar följer regelbundet yttre stimuli. (E) ensidigt amplitudspektrum (SSAS) i genomsnitt för maneter utan yttre stimulans (n =12 för 10 djur, d.v.s. 2 maneter hade två replikklipp vardera). Den röda linjen anger medelvärdet för normaliserad SSAS för varje replikat, med SD i rosa. Toppen för den genomsnittliga SSAS är vid 0,16 Hz. Hela bredden vid halv max (FWHM) är 0,24 Hz. (F) Maneter svar på en inaktiv elektrod inbäddad (n =14 för 10 djur, d.v.s. 4 maneter hade två replikatklipp vardera). Toppen för den genomsnittliga SSAS är 0,18 Hz. FWHM är 0,16 Hz. Med hjälp av ett tvåprovstest av toppfrekvenserna för båda grupperna, skillnaden mellan de två proverna var statistiskt obetydlig (P =0,68). (G) Prov SSAS för en elektrisk stimulans vid 1,00 Hz (n =10 maneter för en insignal på 4,2 V och 4,0 ms). Toppfrekvensen uppstår vid 1,02 Hz, inom fönstret 0,02 som används för att beräkna SSAS. Observera att spektrumet har en skarpare topp vid frekvensen av intresse (FWHM på 0,04 Hz), i motsats till ett bredare FWHM i (B) och (C), fallen utan någon yttre stimulans. (H) Konturkarta över frekvenssvaret för muskelsammandragningar till yttre elektriska stimuli. Varje vertikal datarad (centrerad på vita linjer vid 0,25, 0,50, 0,75, 1,00, 1,20, 1,50, och 2,00 Hz) representerar PSD vid en elektrisk ingångsfrekvens, med antalet maneter som testats ovan. Färgerna motsvarar PSD -amplituden, där högre värden visas i gult och lägre värden i blått. Den heldragna röda linjen representerar ett en-till-ett-input-output-svar, och den streckade röda linjen representerar den rapporterade fysiologiska gränsen enligt den absoluta absoluta eldfasta perioden för A. aurita muskel (32). Responsiva försök definieras av huruvida toppfrekvenserna i PSD ligger inom ett fönster på 0,06 Hz från den fasta röda kurvan. (I) Konturkartor över försöken som inte svarade. Högre frekvenser upp till 90,00 Hz testades också med liknande PSD som inte svarade. Fotokredit för (A):Nicole W. Xu, Stanford University. Upphovsman:Science Advances, doi:10.1126/sciadv.aaz3194
De fann att naturligt djurbeteende (eller endogen sammandragning) var oregelbundet med hög pulsvariation - inklusive en genomsnittlig toppfrekvens på 0,16 Hz. En inaktiv elektrod ändrade inte signifikant frekvensspektra, medan externt drivna sammandragningar visade en fysiologisk gräns för manetmuskelkontraktioner mellan 1,4 Hz till 1,5 Hz. Teamet genomförde simförsök med det implanterade systemet i en saltvattentank och normaliserade de uppmätta simhastigheterna för att ta hänsyn till variation i djurstorlek. De skalade den normaliserade simhastigheten med medelvärdet av den normaliserade hastigheten i frånvaro av stimulering (dvs. 0 Hz) för att bestämma förbättringsfaktorn. Den maximala förbättringsfaktorn var upp till 2,8 gånger djurens naturliga simhastighet, d.v.s. simhastigheten ökade upp till 2,8 gånger med inbyggd mikroelektronik.
Mycket effektiv enhetens strömförbrukning
De artificiellt kontrollerade maneterna krävde extern kraft från det mikroelektroniska systemet och inre kraft från djurens egen ämnesomsättning. När den körs med ökande frekvenser, det mikroelektroniska systemet för biohybrid robotmaneter förbrukade större watt per kg. Dock, jämfört med befintliga robotar, denna biohybrid -robot använde upp till 1000 gånger mindre extern effekt. Xu et al. jämförde denna prototyp med medusoid- och robotstrålen gjord av råttkardiomyocyter ympade på kiselställningar, och med rent mekaniska robotar samt autonoma undervattensfordon (AUV). Förutom de kostnadseffektiva fördelarna med låg extern strömförbrukning per massa av biohybridroboten, det mikroelektroniska systemet kostar bara mindre än $ 20 från kommersiellt tillgängliga komponenter. Elektrolokationen var också ospecifik och djuren återhämtade sig omedelbart efter experimenten.
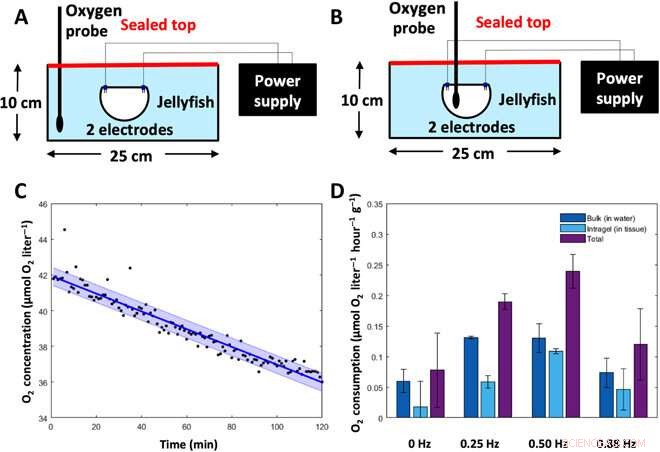
Metabolic rate experiments. To determine the metabolic rate of jellyfish, oxygen concentrations were measured in animal tissue and the surrounding water and then converted into energy expenditure. (A) Experimental setup to measure bulk dissolved oxygen concentrations (in the water). Animals were placed subumbrellar surface upward in a sealed glass dish filled with 2 liters of artificial seawater, with two electrodes for frequency-driven cases. Oxygen levels in the water were measured using a MicroOptode oxygen probe. (B) Experimental setup to measure intragel oxygen concentrations (in the tissue). Animals were placed subumbrellar surface upward in a sealed glass dish filled with 2 liters of artificial seawater, with two electrodes for frequency-driven cases. Intragel oxygen levels were measured using a MicroOptode oxygen probe embedded into the tissue. (C) Representative plot of oxygen concentrations over time, measured from the MicroOptode. This example shows measurements of bulk oxygen levels in the water surrounding an animal with a swim controller–driven frequency of 1.00 Hz. Individual data points are shown in black, the best-fit line is shown in dark blue, and the SD is shown in the light blue shaded region. (D) Oxygen consumption rates of the surrounding water (dark blue), within animal tissue (light blue), and total (sum of the water and tissue measurements, purple) were calculated over a 6- to 8-hour period (n =7 animals).Credit:Science Advances, doi:10.1126/sciadv.aaz3194
The new capability of external control allowed Xu et al. to address the relationship between swimming frequency and metabolic rate. Oxygen consumption rates followed a similar pattern to enhanced swimming speeds, and the scientists calculated the equivalent cost of transport using both experimental metabolic rates and experimental swimming speeds. The COT increased at mid-range frequencies and decreased at high external stimulation frequencies. The results showed that enhanced jellyfish swimming did not cause undue cost to the metabolism or health of the animal.
The main robotic limit of the study was the power requirement of the microelectronic system relative to animal versus microelectronic power needs. Further improvement to microelectronics can decrease the energetic costs and extended studies can also strive to minimize endogenous animal contractions without harming the organism to improve controllability of live-animal-based biohybrid robots. The artificial control of jellyfish can expand ocean monitoring techniques with improved controllability by incorporating microelectronic sensors to leverage the existing tagging technology.
© 2020 Science X Network