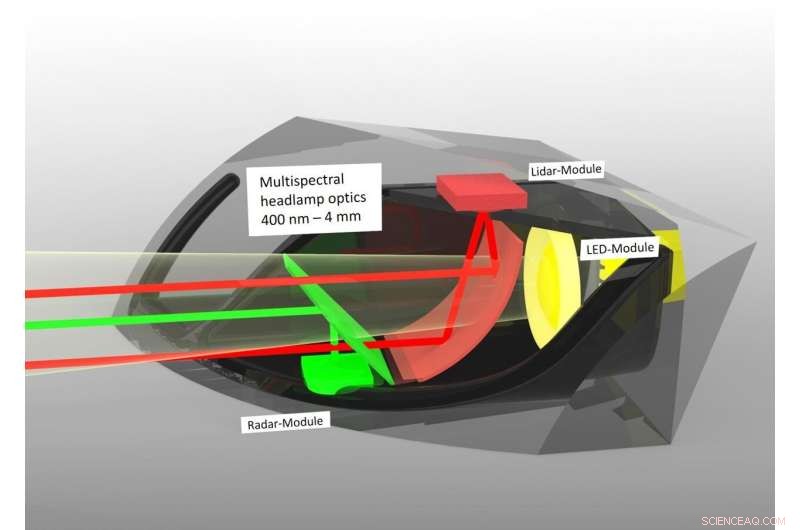
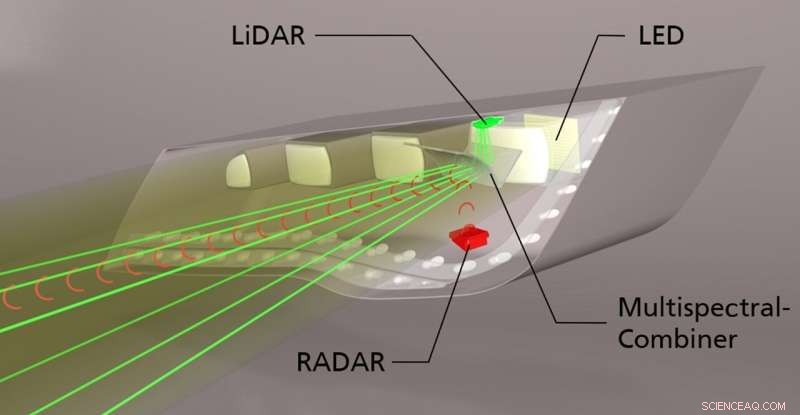
LED-strålkastarmodell med multispektrala kombinatorer för koaxiell sammanslagning av optiskt ljus, LiDAR (röd) och radarstrålar (grön), med syftet att uppnå platsbesparande sensorintegration för nästa generations förarassistanssystem. Kredit:Fraunhofer FHR
Människor använder sina ögon och öron för att uppfatta trafiksituationer som innebär potentiella faror. För att självkörande fordon ska kunna göra samma sak behöver de en hel mängd sensorer. I takt med att antalet sensorer de innehåller ökar, ökar också mängden utrymme som krävs för att passa in dem – något som ofta är oförenligt med designers vision.
Nu har forskare vid Fraunhofer-Gesellschaft upptäckt en metod för att diskret integrera vissa sensorer. Deras lösning ligger i fordonets strålkastare, där de kombinerar optiskt ljus, radar och LiDAR.
Dagens fordon kan själva ta på sig allt fler funktioner utan att kräva förarens insats. Farthållaren håller automatiskt rätt avstånd till framförvarande bil, filbytesvarningssystem korrigerar fordonets väg vid behov och nödbromsen slår in om föraren övertränger.
Allt detta är möjligt tack vare kameror i passagerarområdet och radarsensorer i kylargrillen – och framtiden är inställd på att bilar ska göra ännu mer själva. Att få detta att hända innebär att man använder betydligt fler sensorer, men att proppa grillarna fulla med dem är inget som bildesigners är angelägna om att underhålla.
Radar- och LiDAR-sensorer integrerade i strålkastare
Fem Fraunhofer-institut, inklusive Institute for High Frequency Physics and Radar Techniques FHR, har gått samman som en del av Smart Headlight-projektet för att skapa en metod för att installera sensorer som är både platsbesparande och så subtil som möjligt – utan att kompromissa med funktion eller prestanda.
Projektets syfte är att utveckla en sensorintegrerad strålkastare för förarassistanssystem som gör det möjligt att kombinera en rad sensorelement med adaptiva ljussystem. Förhoppningen är att detta ska förbättra sensorernas förmåga att identifiera föremål på vägen – och särskilt andra trafikanter, som fotgängare. LiDAR-sensorer kan till exempel användas i elektroniska bromsassistenter eller avståndskontrollsystem.
3D-visualisering av multispektral strålkastaroptik. Kredit:Fraunhofer FHR
"Vi integrerar radar- och LiDAR-sensorer i strålkastare som redan finns där ändå - och vad mer är, de är delarna som säkerställer bästa möjliga överföring för optiska sensorer och ljuskällor, och som kan hålla saker rent", säger Tim Freialdenhoven, forskare vid Fraunhofer FHR. LiDAR-sensorer (Light Detection And Ranging) använder en mätprincip som bygger på att bestämma tiden mellan en laserpuls som sänds ut och det reflekterade ljuset tas emot, en metod som ger exceptionellt exakta avståndsmätningar.
Det första steget i att skapa strålkastarsensorer innebär att designa ett LiDAR-system som är lämpligt för integration i bilteknik. Detta måste också beakta det faktum att ljuset som strålar ut på vägen av strålkastaren inte kan hindras av de två extra sensorerna, även om lysdioderna som är ansvariga för ljuset sitter långt bak i strålkastaren.
Av denna anledning placerar forskarna LiDAR-sensorerna överst och radarsensorerna längst ner på strålkastarhöljet. Samtidigt behöver strålarna från båda sensorsystemen följa samma väg som LED-ljuset – något som försvåras av att alla inblandade strålar har olika våglängder.
Det synliga ljuset från strålkastaren mäter i området 400 till 750 nanometer, medan infraröda LiDAR-strålar sträcker sig från 860 till 1 550 nanometer, nära det synliga området. Radarstrålar har å andra sidan en våglängd på fyra millimeter. "Dessa tre våglängder måste slås samman koaxiellt - det vill säga längs samma axel - och det är här vad vi kallar en multispektral kombinerare kommer in", säger Freialdenhoven.
Att styra strålarna koaxiellt på detta sätt är avgörande för att förhindra parallaxfel, som är komplicerade att reda ut. Att arrangera sensorerna bredvid varandra skulle dessutom ta upp betydligt mer utrymme än en koaxial konfiguration, så forskarna kommer runt detta med hjälp av så kallade bi-combiners.
För att kombinera LED-ljus och LiDAR-ljus använder denna lösning en dikroisk spegel med en speciell beläggning, som styr de två strålknippena längs en enda axel med hjälp av våglängdsselektiv reflektion. Samma effekt sker i den andra kombineraren (om än på ett mer komplext sätt på grund av de mycket olika våglängderna), där LED-ljuset, LiDAR-ljuset och radarn kombineras.
Eftersom radarsensorer redan är i utbredd användning inom fordonssektorn måste konstruktioner av bikombinatorer tillåta tillverkare att fortsätta använda befintliga sensorer utan att behöva modifiera dem.
Radarsystem:Penetrerar dimman
Så varför kombinera optiska system, LiDAR och radar överhuvudtaget? "Varje individuellt system har sina styrkor, men också sina svagheter", förklarar Freialdenhoven.
Optiska system uppvisar till exempel begränsad prestanda i situationer där sikten är dålig, såsom dimmiga och dammiga miljöer. Radarsystem, å andra sidan, klarar av att ta täta dimmmoln i steget men är inte särskilt bra på kategorisering:Även om de kan avgöra om något är en person eller ett träd, har deras förmågor ingenting på LiDAR-system.
"Vi arbetar också med att slå samman data från radar och LiDAR - något som kommer att tillföra ett stort värde, särskilt när det kommer till tillförlitlighet", säger Freialdenhoven. Teamet har redan lämnat in en patentansökan och arbetar nu hårt med att skapa en prototyp.
Tekniken kommer att skapa en mängd ytterligare alternativ för att integrera sensorer i förarassistanssystem. Mindre ljusmoduler, mer kompakta LiDAR-sensorer och integrerade radarsensorer kommer att göra det möjligt att skapa multisensorkoncept – särskilt med tanke på självkörande fordonsteknik, där designkraven blir allt mer krävande och installationsutrymmet begränsat.
Som ett resultat kan framtida självkörande system kanske inte bara upptäcka en person, utan också analysera deras hastighet, hur långt borta de är och vinkeln i vilken de är placerade i förhållande till fordonet. + Utforska vidare