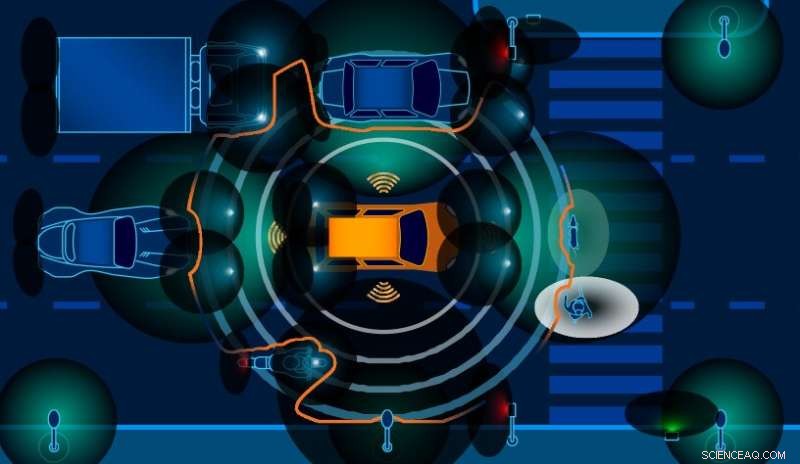
Kredit:Blandad autonomi Era of Transportation:Resilience &Autonomous Fleet Management.
I likhet med när Model Ts reste tillsammans med hästar och barnvagnar, kommer autonoma fordon (AV) och mänskliga fordon (HV) en dag att dela väg. Hur man bäst hanterar ökningen av AV:er är ämnet i en ny Carnegie Mellon policy brief, Mixed-Autonomy Era of Transportation:Resilience &Autonomous Fleet Management.
Debatten fortsätter om när AV:er kommer att dominera våra gator, men en av brevens författare, Carlee Joe-Wong, säger att "när AV:er väl börjar distribueras kommer det förmodligen inte att finnas någon återvändo. Så det är nödvändigt att börja prata om policyer nu, för att studera dem noggrant och få dem rätt när AVs anländer."
Joe-Wong, docent i el- och datateknik, och forskargruppen frågade sig själva "vad är skillnaden när du har AV:er i mixen jämfört med om du bara har HV:er? Vi insåg att en av de största skillnaderna mellan AV:er och HV:er är att AV:er är altruistiska och HV:er är själviska."
AV:er kan förutse vad som kommer att hända och dirigera om sig själva, till exempel vid vägbyggen eller en olycka. Programmerade för att fungera säkert och följa regler, kan AV:er vidta altruistiska åtgärder som gynnar andra fordon och inte bara dem själva. Människor som har bråttom, kanske inte är så generösa med sin tid.
Priset för självisk körning blir uppenbart när man undersöker trafikflödet. När bilar som beter sig själviskt rör sig in och ut ur ett trafiksystem kommer systemet så småningom att nå jämvikt, ett balanserat tillstånd, men trafiken kanske inte flyter så effektivt som det skulle kunna. Jämvikt kan till exempel uppnås när trafiken gnyr längs stötfångare till stötfångare. "Ibland är jämvikten långt ifrån optimal", säger Joe-Wong.
Forskarna tror att altruism kan förbättra trafikflödet genom att undvika suboptimala jämvikter, och alla behöver inte vara trevliga för att förbättra restiderna. I simuleringar spelar altruistiska tillstånd in när AV:er utgör 20 % till 50 % av fordonen på vägen. Rapporten föreslår sätt att belöna altruism, inklusive avgiftsbefrielse, parkeringsrabatter, etc.
Att hitta de bästa driftspolicyerna för AV-flottor är ett annat ämne som tas upp i rapporten. AV:er har kapacitet att arbeta synkroniserat, men central kontroll av tusentals AV:er kommer att leda till beräkningsproblem och kommunikationsförseningar. Forskarna vill hitta en balans mellan centraliserade och decentraliserade policyer med hjälp av förstärkningsinlärning, en träningsmetod för maskininlärning.
Ingenjörerna funderade över hur AV:er fattar beslut. Hur hjälper maskininlärning i denna process, och vilka typer av beslut har störst inverkan? Enligt Joe-Wong, "Under vissa förhållanden behöver du verkligen förstärkningsinlärningsintelligens, men under andra förhållanden är den förstärkningsinlärningen bara att säga åt dig att göra vad du förmodligen skulle ha gjort ändå."
Teamet föreslår att flottoperatörer tränar modeller för att hantera AV-flottor lokalt. Om nya trafikmönster uppstår uppdateras modellerna, särskilt för att leda människor bort från incidenter. Men om trafiken flyter oförminskat, behövs färre uppdateringar, vilket minskar kommunikationen mellan AV:er på vägen och AV:er som rapporterar tillbaka till en centraliserad server.
Det sista problemet som forskarna undersökte var hur man hanterar trafikstockningar och undviker kaskadfel som uppstår när ett fel i ett system utlöser en sekvens av händelser som leder till ett nätverksomfattande fel.
Att arbeta i optimal jämvikt, tillämpa förstärkningsinlärning och ha en högre andel av kollaborativa AV:er kommer att minska trängseln. Men för att ta itu med kaskadfel tog forskarna hänsyn till andra transportsätt som finns i stadsnätverk. Forskarna lade till buss-, tunnelbane-, järnvägs- och cykeldelningssystem till sina modeller, och de kunde visa att om passagerarna justerades mellan olika transportsätt skulle detta maximera användningen av hela nätverket och förhindra att det överbelastas och misslyckas .
Baserat på sina resultat rekommenderar teamet att när planeringsbyråer skapar policyer för omfördelning av trafikflöden för AV:er, överväger de hur man kan integrera flera ömsesidigt beroende transportsystem för att hålla människor i rörelse.
I en tid av blandad autonomi kunde altruistiska AV:er fungera som koordinatorer som håller trafiken flytande genom att framkalla positiva åtgärder från HV:er. Även om det kommer att ta tid innan AV:er är fler än mänskliga fordon, kommer alla förare att märka förbättrade trafikflöden med bara en partiell anpassning av AV:er. + Utforska vidare