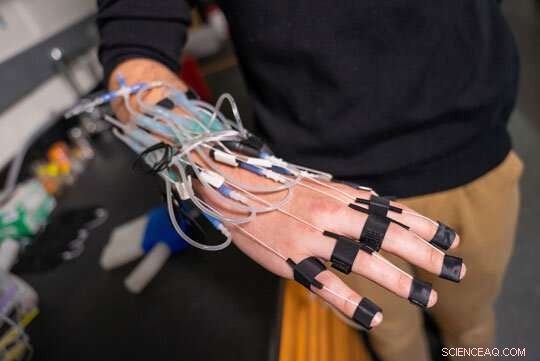
Rice University-studenten Colter Decker, en senior huvudämne i maskinteknik, demonstrerar en handske som användes för att demonstrera de analoga egenskaperna hos mjuka pneumatiska styrkretsar för mjuk robotik. Kredit:Brandon Martin/Rice University
Lägg till analog och luftdriven till listan över styrsystemalternativ för mjuka robotar.
I en studie som publicerades online den här veckan visade robotforskare, ingenjörer och materialvetare från Rice University och Harvard University att det är möjligt att göra programmerbara, icke-elektroniska kretsar som kontrollerar mjuka robotars handlingar genom att bearbeta information kodad i tryckluftskurar.
"En del av det fina med det här systemet är att vi verkligen kan reducera beräkningen ner till dess baskomponenter", säger Rice-studenten Colter Decker, huvudförfattare till studien i Proceedings of the National Academy of Sciences i> . Han sa att elektroniska styrsystem har finslipats och förfinats i årtionden, och att återskapa datorkretsar "med analoger till tryck och flödeshastighet istället för spänning och ström" gjorde det lättare att införliva pneumatisk beräkning.
Decker, en senior med huvudämne i maskinteknik, konstruerade sitt mjuka robotstyrsystem främst av vardagliga material som sugrör och gummiband av plast. Trots sin enkelhet visade experiment att systemets luftdrivna logiska grindar kunde konfigureras för att utföra operationer som kallas booleska funktioner som är köttet och potatisen i modern datoranvändning.
"Målet var aldrig att helt ersätta elektroniska datorer," sa Colter. Han sa att det finns många fall där mjuka robotar eller wearables bara behöver programmeras för ett fåtal enkla rörelser, och det är möjligt att tekniken som visas i tidningen "skulle vara mycket billigare och säkrare att använda och mycket mer hållbar" än traditionella elektroniska kontroller.
Som nybörjare började Decker arbeta i labbet hos Daniel Preston, en biträdande professor i maskinteknik vid Rice. Decker studerade vätskekontrollsystem och blev intresserad av att skapa ett när han vann ett konkurrenskraftigt sommarstipendium som skulle göra det möjligt för honom att tillbringa några månader med att arbeta i Harvard-kemisten och materialforskaren George Whitesides labb.
Projektet förvandlades till ett månader långt samarbete mellan de två forskargrupperna, och Decker hade nio medförfattare till studien, inklusive medförfattarna Preston och Whitesides.
Decker och kollegor skapade två komponenter, ett kolvliknande ställdon som omvandlar lufttrycket till mekanisk kraft och en ventil som kan växlas mellan två lägen - av och på. Komponenterna tillverkades av delar som inkluderade sugrör av plast, flexibla plastslangar, gummiband, pergamentpapper och termoplastiska polyuretanskivor som kunde bindas samman med en skrivbordsvärmepress eller ett varmt strykjärn.
Forskargruppen visade att de två komponenterna kunde kombineras i en enda enhet, en bistabil ventil som fungerar som en omkopplare och använder lufttryck som både ingång och utgång. En specifik mängd lufttryck behövs för att växla mellan av och på lägen. Ventilerna hålls stängda av gummiband, och de programmeras genom att lägga till eller subtrahera gummiband, vilket ändrar mängden tryck som krävs för aktivering. I tester visade Decker att kretsarna kunde användas för att styra en mjuk, handformad robot, en pneumatisk kudde och en robot i skokartongstorlek som kunde gå ett förprogrammerat antal steg, hämta ett föremål och återgå till dess startplats.
"Den största bedriften i detta arbete är inkorporeringen av både digital och analog styrning i samma systemarkitektur", säger Preston. Att ha båda innebär att de pneumatiska styrkretsarna kan programmeras digitalt, med "ettor och nollor som du tänker på i en traditionell dator. Men vi kan också ta in analoga möjligheter, saker som är kontinuerliga", sa han. "Det gör att vi verkligen kan förenkla den övergripande systemarkitekturen och uppnå nya funktioner som inte var tillgängliga i tidigare arbete." + Utforska vidare