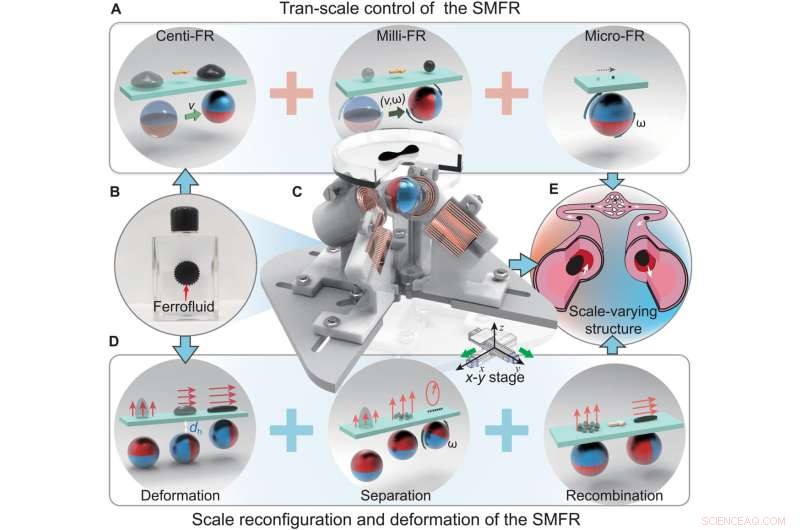
Översikt över trans-skala manöver och skala omkonfigurering strategier av skala-rekonfigurerbara miniatyr ferrofluidic robotar (SMFRs). (A) Trans-scale kontroll av SMFR:förflyttning av centi-FR, milli-FR och mikro-FR baserat på magnetisk gradient, både magnetisk gradient och vridmoment, respektive endast magnetiskt vridmoment. (B) Responsbeteende hos ferrofluiddroppar i magnetfält. (C) SMFR manipuleras av ett specialdesignat magnetiskt aktiveringssystem (M3RA-systemet) som består av fyra elektromagneter, en sfärisk permanentmagnet (SPM) och ett motoriserat översättningssteg. För att enkelt observera systemets interna sammansättning döljer vi en fjärdedel av strukturen. (D) Deformation och skalrekonfiguration av SMFR:sträckdeformation, nedskalning genom separation och uppskalning genom rekombination. Den röda pilen representerar magnetfältets polarisationsriktning. (E) Typiskt tillämpningsscenario för SMFR baserat på kombinationen av ovanstående kapaciteter:förflyttning i ett kraftigt variabelt utrymme såsom det vaskulära nätverket. Kredit:Science Advances (2022). DOI:10.1126/sciadv.abq1677
Ett team av forskare vid Soochow University, som arbetar med två kollegor från Max Planck Institute for Intelligent Systems och en annan från Harbin Institute of Technology har utvecklat en typ av mjuk robot som kan delas upp i mindre komponenter för att passera genom små utrymmen och sedan sättas ihop igen. I deras artikel publicerad i tidskriften Science Advances , beskriver gruppen hur de gjorde sina små robotar och föreslår möjliga användningsområden för dem.
När vetenskapen om robotik fortsätter att mogna, fortsätter ingenjörer runt om i världen att hitta nya sätt att tillverka dem. I denna nya ansträngning gjorde forskarna sitt av en ferrofluid (magnetiska järnoxidnanopartiklar) som de suspenderade i en klar olja. Roboten styrs med hjälp av externa magneter.
Genom att använda en robot gjord av ett material som bara hålls mycket löst samman, konstaterar forskarna, kan dess form ändras på begäran. Genom att applicera flera magnetfält visade de att det var möjligt att styra sin robot genom en labyrint, ibland ändra sin form för att övervinna hinder. De tvingade den att förlängas, till exempel för att pressa sig genom en smal passage. De bröt också upp det i ett önskat antal mindre delar för att passera genom ett poröst material. I båda fallen kunde roboten sedan enkelt sättas ihop till en enda rund robotform och fortsatte sin resa. De noterar att en sådan robot kan tillverkas i en mängd olika storlekar.
Roboten kan tänkas användas i medicinska tillämpningar som ett medel för att transportera droger till svåråtkomliga kroppsdelar, såsom lungnoder eller delar av hjärnan. Forskarna erkänner att för praktiska tillämpningar skulle designen behöva övervinna många hinder, mest uppenbart utvecklingen av ett magnetiskt kontrollsystem som exakt kan penetrera ben som skallen. Under tiden har andra noterat att ett sådant robotsystem kan visa sig vara användbart i lab-on-a-chip-enheter där kemiska processer utförs för uppgifter som virusdetektion. De små nya robotarna skulle kanske kunna användas för att bära de kemikalier som behövs för reaktionerna. + Utforska vidare
© 2022 Science X Network