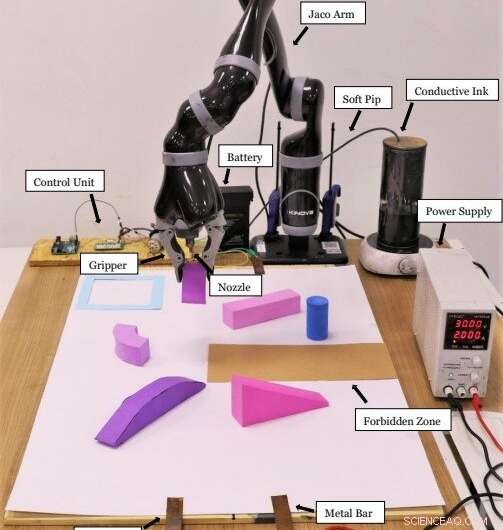
Experimentell uppställning av kretsritningsroboten. Kinova 6DOF Jaco Arm utför först plocka-och-place-åtgärder vid den ställning som föreslagits av nätverket. Sedan rör sig armen till en av metallstängerna 5 cm ovanför kartongen. ROS-styrenheten skickar kontinuerligt waypoints för kretsvägen beräknade från 3D-vägplaneringsalgoritmen. En Arduino tar sedan emot armens tillstånd genom ROS annonsen sätter på/stänger av den peristaltiska pumpen för att kontrollera bläckflödet. Anslutningen börjar visa konduktivitet efter att bläcket torkat (30 minuter). Kredit:Xianglong Tan, Zhikang Liu, Chen Yu, Andre Rosendo, Ordna om miljön för att maximera energin med en robotkretsritning. arXiv:2111.08147v1 [cs.RO], https://arxiv.org/abs/2111.08147
De senaste tekniska framstegen har banat väg för skapandet av allt mer sofistikerade robotsystem utformade för att självständigt utföra uppdrag i olika bekanta och obekanta miljöer. Robotar avsedda att fungera i osäkra eller avlägsna miljöer skulle kunna dra stor nytta av möjligheten att aktivt skaffa elektrisk kraft från sin omgivning.
Forskare vid Worcester Polytechnic Institute, Imperial College London och University of Illinois Urbana Champaign har nyligen utvecklat ett nytt robotsystem som visuellt kan ordna om sin omgivning för att få maximal mängd energi från en given kraftkälla. Denna robot, som presenterades i ett förpublicerat dokument på arXiv och som kommer att presenteras vid IEEE International Conference on Robotics and Biomimetics, fungerar genom att rita elektriska kretsar med ledande bläck.
"Vår PLOS ONE arbetet började som ett ganska filosofiskt tankeexperiment, säger Andre Rosendo, professorn som utförde studien, till TechXplore. "Nietzsche hävdar att människans ursprungliga instinkt är makt, och överlevnad är bara ett villkor som vi inte kunde uppnå. slutmål. Baserat på denna idé började vi utforma experimentella inställningar där vår robot inte bara kunde agera för att överleva, utan för att trivas."
I sin första studie med fokus på detta ämne, försökte Andre Rosendo, Xianglong Tan och Weijie Lyu skapa ett system som kunde driva sig själv enbart genom att måla elektriska kretsar. I sitt nya arbete kombinerade de detta kretsutskriftssystem med en robotgripare, vilket skapade en robot som kan utföra en repertoar av åtgärder som syftar till att uppnå större kraft (d.v.s. högre spänningar) från sin omgivning och därmed överleva i ogynnsamma miljöer.
Teamet testade sin robot i simuleringar av olika verkliga scenarier, inklusive uppgifter där den var tvungen att undvika fysiska hinder eller regioner som skulle avbryta sina ritade kretsar. Sedan testade de roboten i en verklig miljö för att ytterligare utvärdera dess kapacitet.
"Vår robot startar varje experiment med ett batteri, och dess energikälla avtar när den rör sig (och vi "läcker" den också för att efterlikna naturliga energiförluster på grund av homeostas), förklarade studenten Xianglong Tan. "Roboten går igenom en serie virtuella träningsepisoder, med en röd terminal (VCC) som måste kopplas till en annan röd terminal nära sin kropp, och en svart terminal (Ground) som behöver matcha den svarta så att den nuvarande kan flöda mot dess batteri."
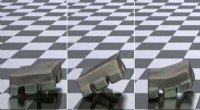
För att förhindra att deras robot bara rör sig i en enkel rak linje, lade Rosendo och hans kollegor till hinder i omgivningen, både i simulerade och verkliga försök. En del av dessa hinder, som skumkuber, kunde lätt tas bort av robotarna, medan andra var kopplade till en jordningsplatta som "sög" bort den elektriska kraften när en krets vidrörde den.
Teamet fann att deras robot snabbt och effektivt lärde sig att övervinna dessa hinder för att överleva och maximera den mottagna energin. Detta innebar att omorganisera hinder eller överbrygga områden i sin omgivning som den inte kunde dra in.
"Jag tror att vi tar steg mot adaptiva beteenden för robotar," sa Rosendo. "Människor är kapabla att anpassa sig, anpassa sitt beteende för att matcha det som krävs i nya situationer och gradvis förbättras allt eftersom deras kunskap mognar. Vi kan prata om sport, uppgifter eller till och med rymduppdrag:innan vi är på topp i vårt spel spenderar vi våra inledande ansträngningar att förstå de nya reglerna för att senare förbättra och gå längre än. Robotar kämpar numera för att övervinna funktionsfel och att lära sig att anpassa sig för att hålla sig funktionella är en färdighet som de bör härma från oss."
Den anpassande roboten skapad av Rosendo och hans kollegor kan ha många fördelar, eftersom den självständigt kan maximera energin i sin omgivning och kontinuerligt hålla sig funktionell genom att skapa nya elektriska kretsar. I framtiden kan detta senaste arbete inspirera till utvecklingen av andra robotsystem som kan överleva och frodas i komplexa miljöer utan behov av nya kretsar eller mänsklig övervakning.
"Vi funderar nu på nästa steg för att bygga vidare på vårt arbete och hålla det här experimentet intressant, som att komplicera uppgiften och ta fram ett "batteribyte"-system för att göra experimentet mer realistiskt, tillade Tan. + Utforska vidare
© 2022 Science X Network