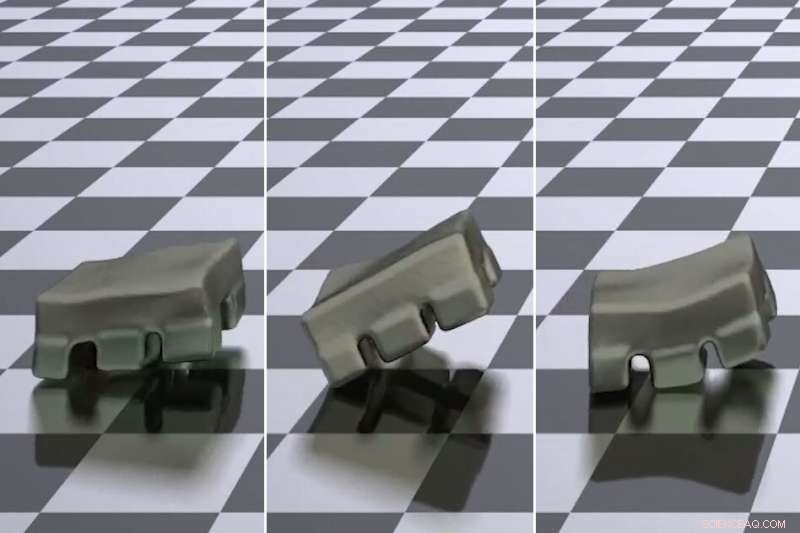
En MIT-uppfunnen modell optimerar effektivt och samtidigt kontroll och design av mjuka robotar för måluppgifter, som traditionellt har varit ett monumentalt företag inom beräkning. Modellen, till exempel, var betydligt snabbare och mer exakt än de senaste metoderna för att simulera hur fyrfotade robotar (bilden) ska röra sig för att nå måldestinationer. Kredit:Andrew Spielberg, Daniela Rus, Wojciech Matusik, Allan Zhao, Tao Du, och Yuanming Hu
MIT-forskare har uppfunnit ett sätt att effektivt optimera kontrollen och designen av mjuka robotar för måluppgifter, som traditionellt har varit ett monumentalt företag inom beräkning.
Mjuka robotar har fjädrande, flexibel, stretchiga kroppar som i princip kan röra sig på ett oändligt antal sätt vid varje givet ögonblick. Beräkningsmässigt, detta representerar en mycket komplex "statsrepresentation, " som beskriver hur varje del av roboten rör sig. Tillståndsrepresentationer för mjuka robotar kan ha potentiellt miljontals dimensioner, vilket gör det svårt att beräkna det optimala sättet att få en robot att utföra komplexa uppgifter.
Vid konferensen om neurala informationsbehandlingssystem nästa månad, MIT-forskarna kommer att presentera en modell som lär sig en kompakt, eller "lågdimensionell, "men ändå detaljerad statlig representation, baserat på den underliggande fysiken hos roboten och dess miljö, bland andra faktorer. Detta hjälper modellen att iterativt samoptimera rörelsekontroll och materialdesignparametrar för specifika uppgifter.
"Mjuka robotar är oändligt dimensionella varelser som böjer sig på en miljard olika sätt vid varje givet ögonblick, " säger första författaren Andrew Spielberg, en doktorand i Computer Science and Artificial Intelligence Laboratory (CSAIL). "Men, i sanning, det finns naturliga sätt att mjuka föremål kan böjas. Vi finner att mjuka robotars naturliga tillstånd kan beskrivas mycket kompakt i en lågdimensionell beskrivning. Vi optimerar kontroll och design av mjuka robotar genom att lära oss en bra beskrivning av de troliga tillstånden."
I simuleringar, modellen gjorde det möjligt för 2-D och 3-D mjuka robotar att utföra uppgifter – som att flytta vissa avstånd eller nå en målplats – snabbare och mer exakt än dagens toppmoderna metoder. Forskarna planerar nästa att implementera modellen i riktiga mjuka robotar.
Med Spielberg på tidningen är CSAIL-studenterna Allan Zhao, Tao Du, och Yuanming Hu; Daniela Rus, chef för CSAIL och Andrew och Erna Viterbi professor i elektroteknik och datavetenskap; och Wojciech Matusik, en MIT docent i elektroteknik och datavetenskap och chef för Computational Fabrication Group.
"Lärande-i-slingan"
Mjuk robotik är ett relativt nytt forskningsfält, men det lovar för avancerad robotteknik. Till exempel, flexibla kroppar skulle kunna erbjuda säkrare interaktion med människor, bättre föremålsmanipulation, och mer manövrerbarhet, bland andra förmåner.
Kontroll av robotar i simuleringar bygger på en "observatör, " ett program som beräknar variabler som ser hur den mjuka roboten rör sig för att slutföra en uppgift. I tidigare arbete, forskarna sönderdelade den mjuka roboten till handdesignade kluster av simulerade partiklar. Partiklar innehåller viktig information som hjälper till att begränsa robotens möjliga rörelser. Om en robot försöker böja sig på ett visst sätt, till exempel, ställdon kan motstå den rörelsen tillräckligt mycket för att den kan ignoreras. Men, för sådana komplexa robotar, att manuellt välja vilka kluster som ska spåras under simuleringar kan vara knepigt.
Bygger på det arbetet, forskarna designade en "learning-in-the-loop optimization"-metod, där alla optimerade parametrar lärs in under en enda återkopplingsslinga över många simuleringar. Och, samtidigt som inlärningsoptimering — eller "in the loop" — lär sig metoden också tillståndsrepresentationen.
Modellen använder en teknik som kallas en materialpunktsmetod (MPM), som simulerar beteendet hos partiklar av kontinuummaterial, som skum och vätskor, omgiven av ett bakgrundsrutnät. Genom att göra så, den fångar robotens partiklar och dess observerbara miljö i pixlar eller 3D-pixlar, känd som voxels, utan att behöva någon ytterligare beräkning.
I en inlärningsfas, denna råa partikelnätinformation matas in i en maskinlärande komponent som lär sig att mata in en bild, komprimera den till en lågdimensionell representation, och dekomprimera representationen tillbaka till inmatningsbilden. Om denna "autokodare" behåller tillräckligt med detaljer när den inmatade bilden komprimeras, den kan exakt återskapa ingångsbilden från komprimeringen.
I forskarnas arbete har autokodarens inlärda komprimerade representationer fungerar som robotens lågdimensionella tillståndsrepresentation. I en optimeringsfas, den komprimerade representationen går tillbaka in i styrenheten, som matar ut en beräknad aktivering för hur varje partikel i roboten ska röra sig i nästa MPM-simulerade steg.
Samtidigt, styrenheten använder den informationen för att justera den optimala styvheten för varje partikel för att uppnå önskad rörelse. I framtiden, att materialinformation kan vara användbar för 3-D-utskrift av mjuka robotar, där varje partikelfläck kan tryckas med något olika styvhet. "Detta gör det möjligt att skapa robotdesigner anpassade till robotens rörelser som kommer att vara relevanta för specifika uppgifter, " säger Spielberg. "Genom att lära sig dessa parametrar tillsammans, du håller allt så synkroniserat som möjligt för att göra designprocessen enklare."
Snabbare optimering
All optimeringsinformation är i tur och ordning, matas tillbaka till början av slingan för att träna autokodaren. Under många simuleringar, regulatorn lär sig den optimala rörelsen och materialdesignen, medan autokodaren lär sig den allt mer detaljerade tillståndsrepresentationen. "Nyckeln är att vi vill att det lågdimensionella tillståndet ska vara väldigt beskrivande, " säger Spielberg.
När roboten har nått sitt simulerade slutliga tillstånd under en viss tidsperiod – säg, så nära måldestinationen som möjligt – den uppdaterar en "förlustfunktion". Det är en kritisk komponent i maskininlärning, som försöker minimera vissa fel. I detta fall, det minimerar, säga, hur långt bort roboten stannade från målet. Den förlustfunktionen flödar tillbaka till styrenheten, som använder felsignalen för att justera alla optimerade parametrar för att på bästa sätt slutföra uppgiften.
If the researchers tried to directly feed all the raw particles of the simulation into the controller, without the compression step, "running and optimization time would explode, " Spielberg says. Using the compressed representation, the researchers were able to decrease the running time for each optimization iteration from several minutes down to about 10 seconds.
The researchers validated their model on simulations of various 2-D and 3-D biped and quadruped robots. They researchers also found that, while robots using traditional methods can take up to 30, 000 simulations to optimize these parameters, robots trained on their model took only about 400 simulations.
Deploying the model into real soft robots means tackling issues with real-world noise and uncertainty that may decrease the model's efficiency and accuracy. Men, in the future, the researchers hope to design a full pipeline, from simulation to fabrication, for soft robots.