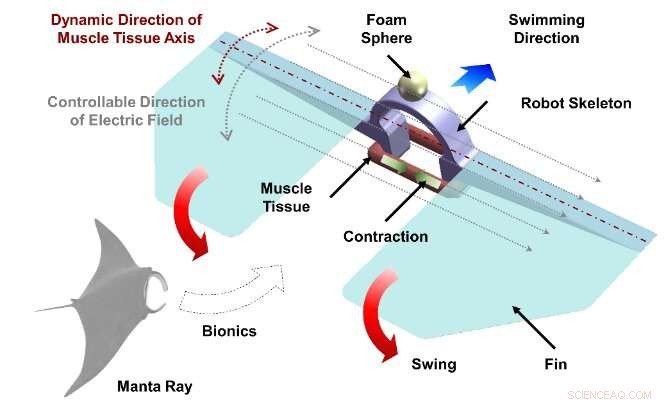
Denna biosynkretiska simmare bestod av en skelettstruktur, två fenor, ett levande ställdon och en mikrosfär med skumbalans. Kredit:Chuang Zhang, Shenyang Institute of Automation, Chinese Academy of Sciences
Naturen har gett stort stöd för utvecklingen av robotar. Inspirerat av mantor har ett team från State Key Laboratory of Robotics vid Shenyang Institute of Automation, Chinese Academy of Sciences, utvecklat en bionisk simrobot som manövreras av odlad skelettmuskelvävnad och kontrolleras av cirkulärt distribuerade multipla elektroder (CDME) . Roboten kan effektivt drivas av endast en muskelvävnad.
Biomimetik är en av de viktigaste robotforskningsmetoderna, som kan förbättra robotars kinematiska prestanda genom att imitera naturliga organismers struktur och beteende. Den biosynkretiska roboten, som använder naturliga biologiska material som kärnelementet, är vidareutvecklingen av bionik.
Vissa levande celler har använts för att realisera vissa funktioner hos robotar, inklusive avkänning, kontroll och aktivering. Det behövs dock innovativa framdrivnings- och kontrollmetoder för att vidareutveckla biosynkretrobotarnas kontrollerbara rörelseprestanda. För att lösa detta problem föreslog forskare en dynamisk kontrollmetod baserad på CDME. Forskningen publicerades i tidskriften Cyborg and Bionic Systems .
Teamet fann att det elektriska fältet som genereras av CDME var mindre skadligt för odlingsmediet och cellerna än konventionella elektroder. Med denna metod kunde riktningen för det elektriska fältet som genereras av elektroden styras dynamiskt, hålla det parallellt med robotens drivvävnad i realtid, vilket säkerställer stabil kontroll av roboten.
Först designade teamet robotskelettet baserat på mantorns struktur och använde polydimetylsiloxan (PDMS) som huvudmaterial för strukturen. Samtidigt, för att underlätta sammansättningen av drivvävnaden och robotstrukturen, valde forskarna den ringformade vävnaden gjord av myoblaster som robotens drivenhet.
Dessutom, för att erhålla cirkulära muskelvävnader med effektiv kontraktilitet, användes en roterande elektrisk stimulering från CDME för att åstadkomma enhetlig induktion av myoblasterna för att differentiera till myotuber. För att roboten skulle kunna simma i önskad hastighet, mättes muskelvävnadens kontraktilitet före montering med simmarstrukturen. Forskargruppen använde också simuleringsmetoder för att analysera sambandet mellan robotens rörelseprestanda och den drivande vävnadens sammandragningskraft.
Slutligen, för att demonstrera den stabila och kontrollerbara rörelsen hos den föreslagna biosynkretiska roboten, insåg forskarna robotens kontrollerbara simning i olika hastigheter med hjälp av den föreslagna dynamiska elektriska stimuleringsmetoden. I experimentet visade roboten effektiv simning och stabil styrbarhet, vilket verifierade effektiviteten av den biomimetiska designen och den CDME-baserade kontrollmetoden som föreslagits av forskargruppen.
Den biomimetiska design- och aktiveringskontrollmetoden som föreslås i denna studie främjar inte bara vidareutvecklingen av biosynkretiska robotar utan har också en viss vägledande betydelse för den biomimetiska designen av mjuka robotar, muskelvävnadsteknik och andra relaterade områden.
Men även om de nuvarande biosynkreta robotarna har uppnått effektiv kontrollerad rörelse, finns det fortfarande många viktiga flaskhalsar som måste övervinnas. Till exempel är de flesta robotarna centimeterstora, vilket är svårt för tillämpningar som läkemedelstillförsel in vivo.
Teknik inklusive 3D-utskrift och flexibel manipulation inriktad på mikro-nano biologiska strukturer är nyckeln till att utveckla biosynkretiska mikrorobotar för kliniska applikationer och andra speciella miljöer. Dessutom är de flesta av de befintliga biosynkretiska robotarna beroende av externa konstgjorda stimuli för att uppnå kontrollerad rörelse, som kan sakna autonomi. Därför kan avkännings- och kontrollmetoden baserad på levande celler tillämpas på forskningen av biosynkreta robotar för att realisera autonom robotrörelse baserad på miljöinformation. + Utforska vidare














