Kredit:Lee et al.
Under de senaste åren har algoritmer för djupinlärning uppnått anmärkningsvärda resultat inom en mängd olika områden, inklusive konstnärliga discipliner. Faktum är att många datavetare över hela världen har framgångsrikt utvecklat modeller som kan skapa konstnärliga verk, inklusive dikter, målningar och skisser.
Forskare vid Seoul National University har nyligen introducerat ett nytt konstnärligt ramverk för djupinlärning, som är utformat för att förbättra färdigheterna hos en skissrobot. Deras ramverk, som introducerades i en artikel som presenterades på ICRA 2022 och förpublicerad på arXiv, gör det möjligt för en skissrobot att lära sig både slagbaserad rendering och motorstyrning samtidigt.
"Den primära motivationen för vår forskning var att göra något coolt med icke-regelbaserade mekanismer som djupinlärning; vi tyckte att ritning är en cool sak att visa om ritaren är en lärd robot istället för människa," Ganghun Lee, den tidningens första författare, berättade för TechXplore. "De senaste teknikerna för djupinlärning har visat häpnadsväckande resultat inom det konstnärliga området, men de flesta handlar om generativa modeller som ger hela pixelresultat på en gång."
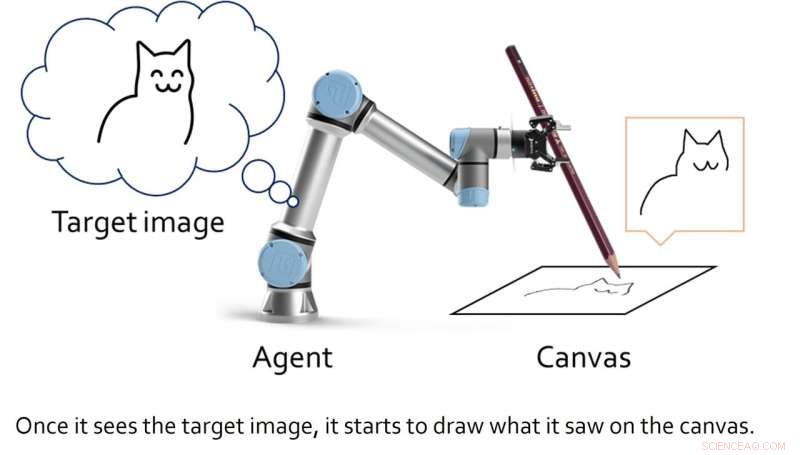
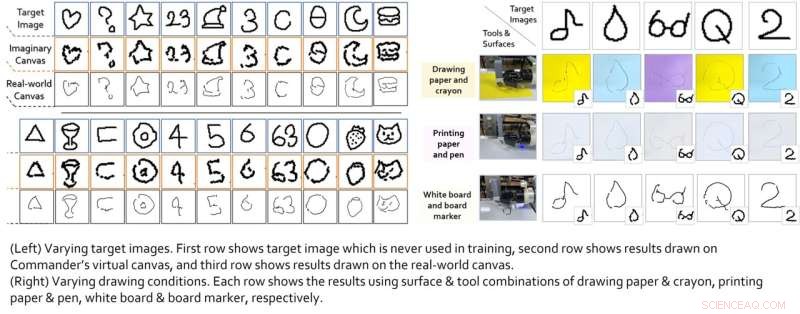
Istället för att utveckla en generativ modell som producerar konstnärliga verk genom att generera specifika pixelmönster, skapade Lee och hans kollegor ett ramverk som representerar teckning som en sekventiell beslutsprocess. Denna sekventiella process liknar det sätt på vilket människor ritar individuella linjer med en penna eller penna för att gradvis skapa en skiss.
Forskarna hoppades sedan kunna tillämpa sitt ramverk på ett robotiskt skissmedel, så att det kunde producera skisser i realtid med en riktig penna eller penna. Medan andra team skapade algoritmer för djupinlärning för "robotartister" tidigare, krävde dessa modeller vanligtvis stora träningsdatauppsättningar som innehöll skisser och ritningar, såväl som omvända kinematiska metoder för att lära roboten att manipulera en penna och skissa med den.
Ramverket skapat av Lee och hans kollegor, å andra sidan, tränades inte på några verkliga ritningsexempel. Istället kan den självständigt utveckla sina egna ritstrategier över tid, genom en process av försök och misstag.
"Vårt ramverk använder inte heller omvänd kinematik, som gör robotrörelser lite strikta, istället låter det systemet också hitta sina egna rörelsetrick (justera ledvärden) för att göra rörelsestilen så naturlig som möjligt," sa Lee. "Med andra ord, den flyttar sina leder direkt utan primitiver medan många robotsystem vanligtvis använder primitiver för att röra sig."
Kredit:Lee et al.
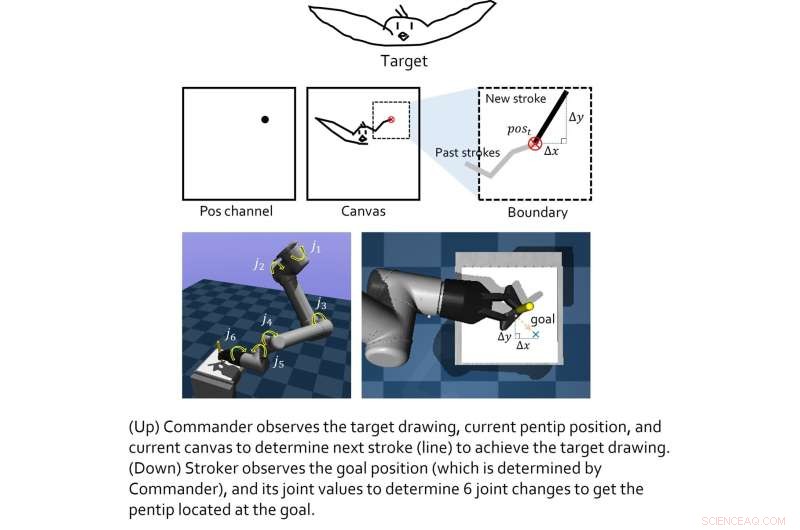
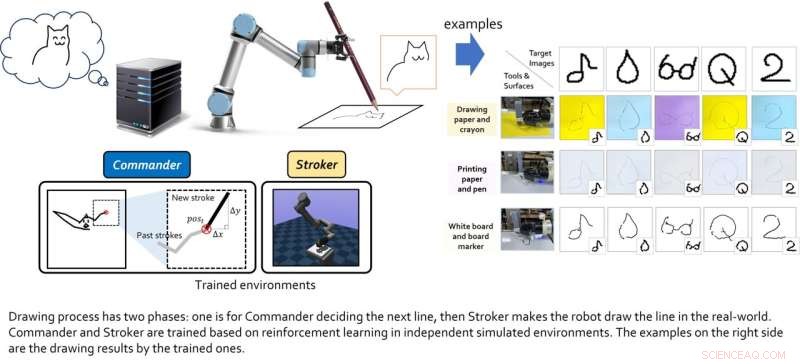
Modellen som skapats av detta team av forskare inkluderar två "virtuella agenter", nämligen överklassens och underklassens agent. Överklassagentens roll är att lära sig nya ritknep, medan underklassens agent lär sig effektiva rörelsestrategier.
De två virtuella agenterna tränades individuellt med hjälp av förstärkningsinlärningstekniker och kopplades ihop först när de hade slutfört sin respektive utbildning. Lee och hans kollegor testade sedan sin kombinerade prestanda i en serie verkliga experiment, med en 6-DoF robotarm med en 2D-gripare på. Resultaten som uppnåddes i dessa första tester var mycket uppmuntrande, eftersom algoritmen gjorde det möjligt för robotagenten att producera bra skisser av specifika bilder.
Kredit:Lee et al.
"Vi finner att de förstärkande inlärningsbaserade modulerna som utbildats för varje mål kan slås samman för att uppnå större samarbetsmål," förklarade Lee. "I en hierarkisk miljö kan beslut från den övre agenten vara "mellantillståndet", vilket gör det möjligt för den lägre agenten att observera för att fatta lägre beslut. Om varje agent av nivåer är välutbildad och tillräckligt generaliserad för varje tillståndsrum, då Hela systemet som görs av varje modul kan göra fantastiska saker. Den primära förutsättningen är dock att, eftersom alla metoder för förstärkningsinlärning har det, bör belöningsfunktionerna för varje agent vara välformade (det är inte lätt)."
I framtiden kan det ramverk som skapats av Lee och hans kollegor användas för att förbättra prestandan hos både befintliga och nyutvecklade robotskissagenter. Under tiden utvecklar Lee liknande kreativa förstärkande lärande-baserade modeller, inklusive ett system som kan producera konstnärliga collage.
Kredit:Lee et al.
"Vi skulle också vilja utvidga uppgiften till mer komplicerade robotritningar som målningar, men jag fokuserar nu mer på de praktiska frågorna om själva förstärkningsinlärningsapplikationerna än robotritningarna", tillade Lee. "Jag hoppas att vår uppsats blir ett roligt och meningsfullt exempel på ren förstärkningsinlärningsbaserad tillämpning speciellt utrustad med robotar." + Utforska vidare
© 2022 Science X Network