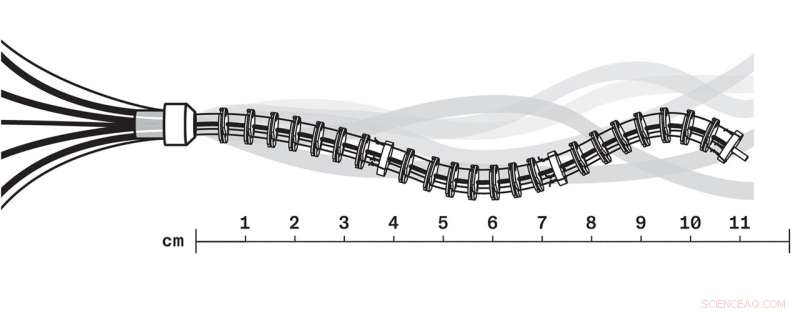
De "sendrivna" kontinuumrobotarna som avbildas här är i verkligheten cirka sju millimeter i diameter och är byggda i sektioner som kan variera i längd från 15 till 70 millimeter. Andra modeller kan vara ännu smalare. Alla uppvisar en tentakelliknande rörelse. Kredit:University of Toronto
Jessica Burgner-Kahrs, chef för Continuum Robotics Lab vid University of Toronto Mississauga, och hennes team bygger mycket smala, flexibla och utdragbara robotar, några millimeter i diameter, för användning inom kirurgi och industri. Du kan kalla det "zoobotics".
Till skillnad från humanoida robotar har så kallade kontinuumrobotar långa, benlösa kroppar – inte olikt en orms – som gör att de kan komma åt svåråtkomliga platser.
Överväg en neurokirurg som behöver ta bort en hjärntumör. Med hjälp av ett traditionellt, stelt kirurgiskt verktyg måste kirurgen nå cancermassan genom att följa en rak väg in i hjärnan och riskera att peta igenom – och skada – vital vävnad.
En docent i matematiska och beräkningsvetenskapliga vetenskaper vid U of T Mississauga, Burgner-Kahrs föreställer sig en dag då en av hennes ormliknande robotar, guidad av en kirurg, skulle kunna ta en slingrande väg runt den vitala vävnaden men ändå nå exakt operationsställe. Tidigare inoperabla hjärntumörer kan plötsligt bli opererbara.
"Det kan revolutionera operationen", säger hon.
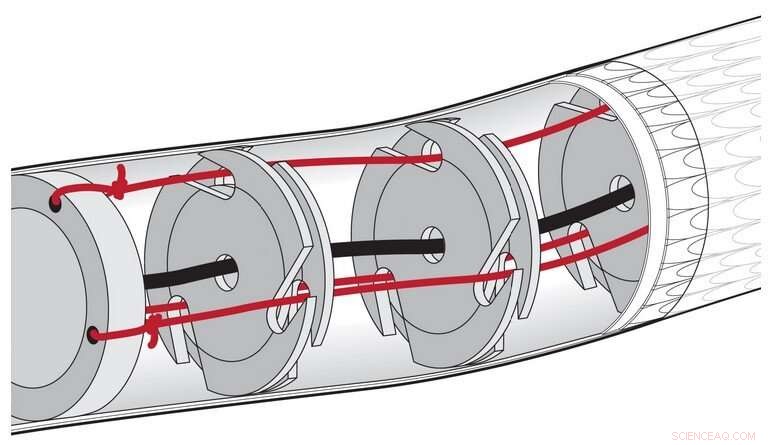
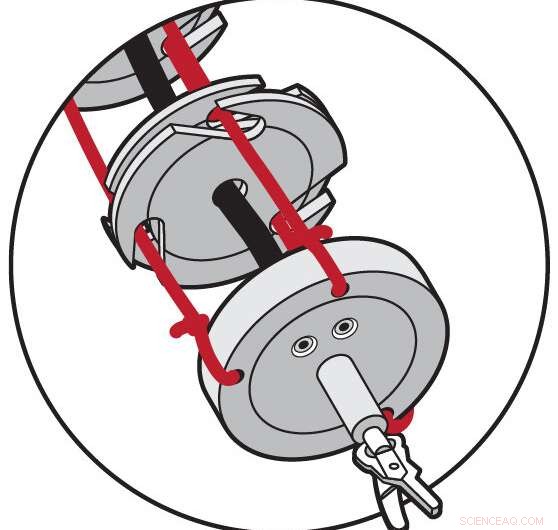
Trådar som löper genom robotens "kropp" fästs på en tjockare skiva i slutet av varje kroppssegment. Dessa trådar dras för att styra enskilda segment av roboten och böja dem i olika riktningar. Magneter inom varje skiva, arrangerade med alternerande polariteter, säkerställer att skivorna förblir på samma avstånd oavsett längden på robotsegmentet. Detta hjälper roboten att böja sig som önskat och att korsa en kurvlinjär bana i en "följ-ledaren"-rörelse - den ormliknande "kroppen" följer "huvudets" väg. Labbet har utvecklat ett hölje av överlappande fjäll mellan två lager av silikon. När ett vakuum appliceras mellan silikonskikten blir den normalt flexibla roboten stel. Kredit:Colin Hayes
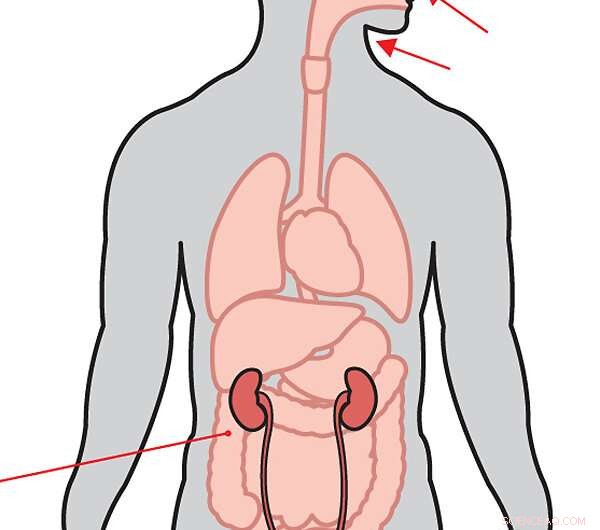
Burgner-Kahrs, datavetare och maskiningenjör, säger att hennes labb också utvecklar en mer avancerad generation av kontinuumrobotar som är utrustade med sensorer och delvis kan styra sig själva. En kirurg skulle behöva fjärrstyra roboten med en dator, men roboten skulle veta hur man undviker hinder och känner igen sin destination. En kirurg skulle kunna använda en av dessa robotar för att ta ett vävnadsprov från buken, till exempel, eller injicera ett cancerläkemedel direkt i en tumör i lungorna.
Det finns användningsområden utanför människokroppen också.
Burgner-Kahrs utvecklar olika typer av kontinuumrobotar som kan användas i nyckelhålsoperationer, vilket orsakar ännu mindre trauma för patienter än nuvarande minimalt invasiva kirurgiska tekniker. Kredit:Colin Hayes
En kontinuumrobot kan glida genom det inre av en jetmotor och inspektera den för skador. Labbet experimenterar med nya former som är ännu mer fingerfärdiga och töjbara. En ny design, med potentiella sök- och räddningsapplikationer, är inspirerad av origami:den är väldigt lätt och kan töjas upp till 10 gånger längre än andra mönster.
Robotarna skulle kunna utrustas med kameror, så att operatören kan se var roboten befinner sig. Små kirurgiska verktyg kan monteras efter behov, inklusive pincett, en laser eller en suganordning. Kredit:Colin Hayes
Nästa generations kontinuumrobotar
För att utveckla robotar som säkert kan användas i en mängd olika medicinska och andra tillämpningar, vill Burgner-Kahrs svara på följande frågor:














