Kredit:University of Washington
I början av covid-19-pandemin flyttade biltillverkningsföretag som Ford snabbt sitt produktionsfokus från bilar till masker och ventilatorer.
För att göra denna omställning möjlig förlitade sig dessa företag på personer som arbetade på ett löpande band. Det skulle ha varit för utmanande för en robot att göra denna övergång eftersom robotar är bundna till sina vanliga uppgifter.
Teoretiskt sett kunde en robot plocka upp nästan vad som helst om dess gripdon kunde bytas ut för varje uppgift. För att hålla kostnaderna nere kan dessa gripdon vara passiva, vilket innebär att gripare plockar upp föremål utan att ändra form, liknande hur tången på en gaffeltruck fungerar.
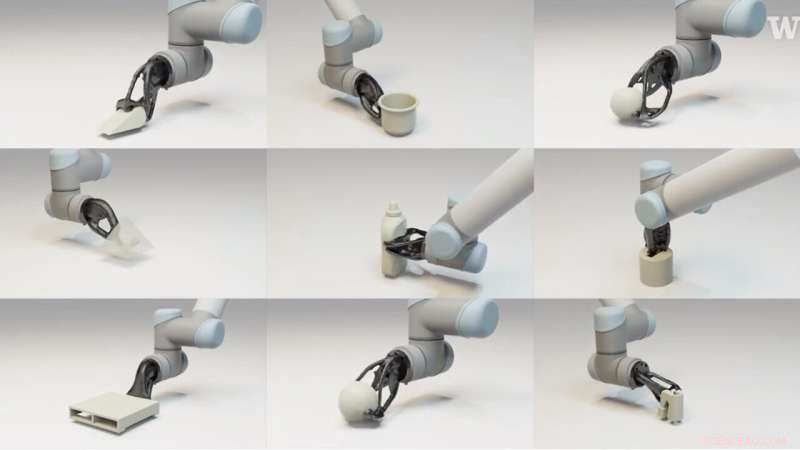
Ett team från University of Washington har skapat ett nytt verktyg som kan designa en 3D-utskrivbar passiv gripare och beräkna den bästa vägen för att plocka upp ett objekt. Teamet testade det här systemet på en svit med 22 objekt – inklusive en 3D-utskriven kanin, en dörrstopparformad kil, en tennisboll och en borr. De designade gripdonen och stigarna var framgångsrika för 20 av objekten. Två av dessa var kilen och en pyramidform med ett böjt nyckelhål. Båda formerna är utmanande för flera typer av gripdon att plocka upp.
Teamet kommer att presentera dessa resultat den 11 augusti på SIGGRAPH 2022.
"Vi producerar fortfarande de flesta av våra artiklar med löpande band, som är riktigt bra men också väldigt stela. Pandemin visade oss att vi måste ha ett sätt att enkelt återanvända dessa produktionslinjer", säger seniorförfattaren Adriana Schulz, biträdande professor vid UW vid Paul G. Allen School of Computer Science &Engineering. "Vår idé är att skapa anpassade verktyg för dessa tillverkningslinjer. Det ger oss en väldigt enkel robot som kan göra en uppgift med en specifik gripare. Och sedan när jag ändrar uppgiften byter jag bara ut griparen."
Passiva gripdon kan inte justeras för att passa föremålet de plockar upp, så traditionellt har föremål designats för att matcha en specifik gripare.
"Den mest framgångsrika passiva griparen i världen är tången på en gaffeltruck. Men avvägningen är att gaffeltrucktången bara fungerar bra med specifika former, som till exempel pallar, vilket betyder att allt du vill greppa måste vara på en pall," sa medförfattare Jeffrey Lipton, UW biträdande professor i maskinteknik. "Här säger vi 'Okej, vi vill inte fördefiniera den passiva griparens geometri.' Istället vill vi ta geometrin hos vilket föremål som helst och designa en gripare."
För varje givet föremål finns det många möjligheter för hur dess gripdon skulle kunna se ut. Dessutom är griparens form kopplad till vägen som robotarmen tar för att plocka upp föremålet. Om designen är felaktig kan en gripare krascha in i föremålet på väg att plocka upp det. För att möta denna utmaning hade forskarna några viktiga insikter.
"Punkterna där griparen kommer i kontakt med föremålet är väsentliga för att bibehålla föremålets stabilitet i greppet. Vi kallar den här uppsättningen av punkter "greppkonfigurationen", säger huvudförfattaren Milin Kodnongbua, som avslutade denna forskning som en UW-student. i Allenskolan. "Dessutom måste griparen kontakta föremålet vid de givna punkterna, och griparen måste vara ett enda fast föremål som förbinder kontaktpunkterna med robotarmen. Vi kan söka efter en insatsbana som uppfyller dessa krav."
När teamet designar en ny gripare och bana börjar teamet med att förse datorn med en 3D-modell av objektet och dess orientering i rymden – till exempel hur det skulle presenteras på ett löpande band.
"Först genererar vår algoritm möjliga greppkonfigurationer och rangordnar dem baserat på stabilitet och några andra mätvärden," sa Kodnongbua. "Då tar den det bästa alternativet och samoptimerar för att hitta om en infogningsbana är möjlig. Om den inte kan hitta en går den till nästa greppkonfiguration på listan och försöker göra samoptimeringen igen."
När datorn har hittat en bra matchning matar den ut två uppsättningar instruktioner:en för en 3D-skrivare för att skapa griparen och en med banan för robotarmen när griparen är utskriven och fäst.
Teamet valde en mängd olika objekt för att testa metodens kraft, inklusive några från en datamängd med objekt som är standarden för att testa en robots förmåga att utföra manipulationsuppgifter.
"Vi designade också föremål som skulle vara utmanande för traditionella griprobotar, till exempel föremål med mycket ytliga vinklar eller föremål med internt grepp - där du måste plocka upp dem med införandet av en nyckel", säger medförfattaren Ian Good, en UW doktorand vid maskinteknikavdelningen.
Forskarna utförde 10 testpickuper med 22 former. För 16 former var alla 10 pickuper framgångsrika. Medan de flesta former hade minst en framgångsrik pickup, gjorde två det inte. Dessa misslyckanden berodde på problem med 3D-modellerna av objekten som gavs till datorn. För det första – en skål – beskrev modellen skålens sidor som tunnare än de var. För den andra – ett föremål som ser ut som en kopp med ett äggformat handtag – hade modellen inte sin rätta orientering.
Algoritmen utvecklade samma gripande strategier för liknande formade objekt, även utan mänsklig inblandning. Forskarna hoppas att detta innebär att de kommer att kunna skapa passiva gripdon som kan plocka upp en klass av objekt, istället för att behöva ha en unik gripare för varje objekt.
En begränsning av denna metod är att passiva gripdon inte kan utformas för att ta upp alla föremål. Även om det är lättare att plocka upp föremål som varierar i bredd eller som har utskjutande kanter, är föremål med jämnt släta ytor, som en vattenflaska eller en låda, svåra att greppa utan några rörliga delar.
Fortfarande uppmuntrades forskarna att se algoritmen fungera så bra, särskilt med några av de svårare formerna, som en kolumn med ett nyckelhål i toppen.
"Vägen som vår algoritm kom fram till för den där är en snabb acceleration ner till där den kommer riktigt nära objektet. Det såg ut som om det skulle krossa objektet, och jag tänkte, "Åh nej. Tänk om vi inte kalibrerade den rätt?'" sa Good. "Och då kommer den förstås otroligt nära och plockar sedan upp den perfekt. Det var detta imponerande ögonblick, en extrem berg-och dalbana av känslor."
Yu Lou, som avslutade den här forskningen som en masterstudent vid Allen School, är också medförfattare till denna artikel.