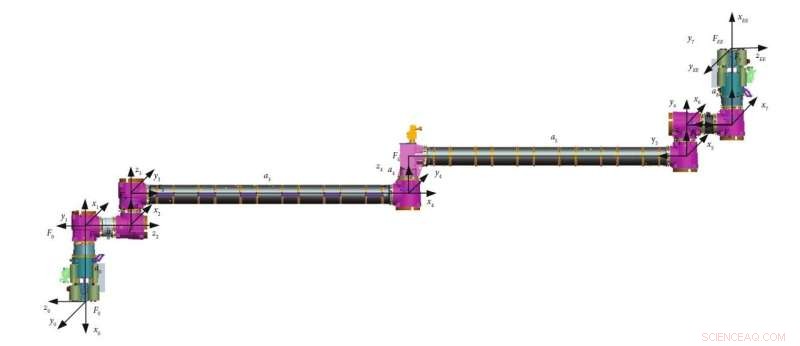
I forskningen presenteras simuleringsresultaten av vår rekursiva sammansatta adaptiva kontrollalgoritm i jämförelse med den direkta adaptiva kontrollalgoritmen. Koordinatramarna för den kinesiska rymdstationens manipulator är inritade här. Kredit:Space:Science &Technology
I processen för konstruktion och rutinunderhåll av den kinesiska rymdstationen spelar manipulatorn en mycket viktig roll som kan utföra några nyckeluppgifter, såsom införlivande dockning, dagligt underhåll och extra extravehikulära aktiviteter. Manipulatorns höga noggrannhet och dynamiska prestanda är nödvändiga för ett framgångsrikt slutförande av dessa uppgifter, vilket ofta kan upprätthållas av kontroller som är designade baserat på dynamikmodellen.
Men i praktiken är det vanligtvis orealistiskt att få alla tröghetsparametrar exakt. Därför är den adaptiva kontrollen utvecklad för att säkerställa konvergensen av spårningskontrollen även om systemet har osäkra eller långsamt förändrade parametrar. I en forskningsartikel som nyligen publicerades i Space:Science &Technology , Dr. Li från State Key Laboratory of Management and Control for Complex Systems, föreslog en ny rekursiv implementering av sammansatt adaptiv kontroll för robotmanipulatorer.
Först återbesökte Dr Li den sammansatta adaptiva styrenheten som föreslagits av Slotine och Li. Adaptiv styrning kan säkerställa konvergens av spårningsstyrning även om systemet har osäkra eller långsamt växlande parametrar. I allmänhet kan detta schema delas in i två klasser som kallas direkt anpassning och indirekt anpassning enligt signalen som driver parameteruppdateringslagen.
I den första kategorin drivs parameteruppdateringen av spårningsfelen, medan i den andra kategorin modifieras parametrarna enligt prediktionsfelen, vanligtvis för de filtrerade ledmomenten. Adaptiv kontroll baserad på spårningsfel kan vanligtvis garantera en global spårningskonvergens; konvergeringen av uppskattade parametrar har emellertid strängare villkor. I jämförelse har den indirekta adaptiva kontrollen en snabbare parameterkonvergenshastighet, men det är i allmänhet svårt att erhålla stabiliteten hos spårningsfelen.
Genom att kombinera de två metoderna har den välkända sammansatta adaptiva styrenheten fördelarna med båda, där parameteranpassningen drivs av både spårningsfel och prediktionsfel. Emellertid är beräkningskomplexiteten för dessa adaptiva styrmetoder en huvudbegränsning i de praktiska robotmanipulatorerna, särskilt för fallet med hög grad av frihet. Hittills har endast ett fåtal verk uppmärksammat den rekursiva exekveringen av den indirekta adaptiva eller den sammansatta adaptiva styrenheten, förmodligen för att användningen av prediktionsfelet uttryckt av regressionsmatrisen gör det mycket svårt att reducera ordningen för beräkningskomplexiteten.
För att lösa de ovan nämnda svårigheterna skrev Dr Li om Newton-Euler-formuleringen genom att använda formen av allmänna matriser från den klassiska Rekursiva Newton-Euler-algoritmen. Sedan utformas den rekursiva sammansatta adaptiva styrmetoden och stabiliteten hos den föreslagna metoden verifieras genom att välja en lämplig Lyapunov-funktion. Den beräkningsmässiga komplexiteten för den föreslagna rekursiva sammansatta anpassningen är mycket mindre än i de befintliga studierna. Anledningen är att i den ursprungliga sammansatta styrenheten har ingen hänsyn tagits till dess beräkningsaspekter. Eftersom beräkningsbelastningen för de föreslagna styrenheterna är i samma skala som de rekursiva direkt adaptiva styrenheterna, utförs en jämförelse mellan dessa två metoder.
Resultaten visar att spårningsfelen uppenbarligen minskas genom att använda den rekursiva sammansatta adaptiva styrenheten, och parameteruppskattningarna konvergerar snabbare med den rekursiva sammansatta adaptiva styrenheten. I simuleringsdelen används den kinesiska rymdstationens manipulator som ett simuleringsexempel, och resultaten verifierar effektiviteten av den föreslagna rekursiva algoritmen. Dessutom, eftersom beräkningsbelastningen är linjär med antalet leder, är den föreslagna metoden attraktiv speciellt för den redundanta flerledsmanipulatorn.