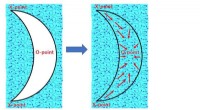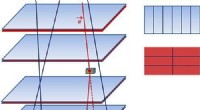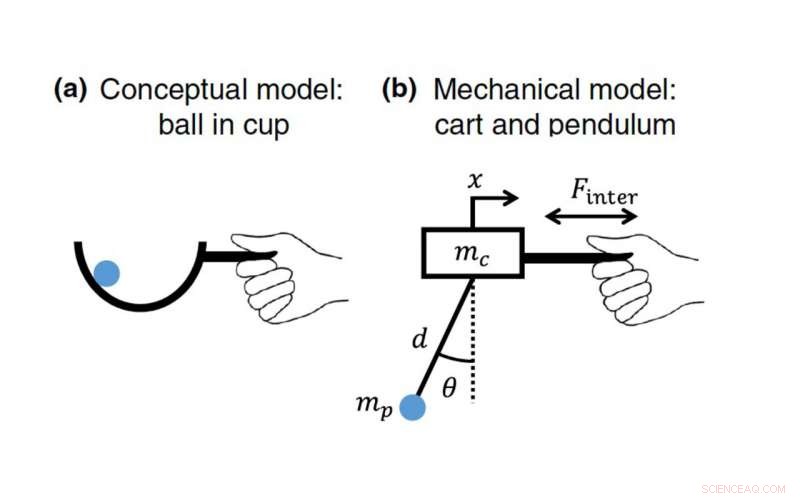
En schematisk illustration av vagn-pendelsystemet för att simulera människans hantering av ett komplext objekt, till exempel en kopp varmt kaffe:(a) en konceptuell modell av en boll som rullar inuti en cirkulär kopp och (b) en olinjär mekanisk modell av en pendel fäst vid en rörlig vagn, som beskrivs matematiskt av en uppsättning differentialekvationer. Kredit:Brent Wallace, Ying-Cheng Lai, Arizona State University
Att promenera med kaffe är något de flesta av oss gör varje dag utan att tänka på vilken balansgång det kräver. Faktiskt, det är mycket fysik som förhindrar att kaffet rinner över.
Kaffet, en termiskt omrörd vätska som finns i en kopp, har interna frihetsgrader som samverkar med koppen som, i tur och ordning, interagerar med den mänskliga bäraren.
"Medan människor har en naturlig, eller begåvad, förmåga att interagera med komplexa föremål, vår förståelse av dessa interaktioner – särskilt på en kvantitativ nivå, är bredvid noll, " sa ASU-professor Ying-Cheng Lai, professor i elteknik vid Arizona State University. "Vi har ingen medveten förmåga att analysera påverkan av yttre faktorer, som buller eller klimat, på våra interaktioner."
Än, att förstå dessa externa faktorer är en grundläggande fråga inom tillämpade områden som mjuk robotik.
"Till exempel, i design av smarta proteser, det blir allt viktigare att bygga in naturliga flexibilitetssätt som efterliknar den naturliga rörelsen hos mänskliga lemmar, sa Brent Wallace, en tidigare student hos Lai och nu doktorand vid ASU:s Ira A. Fulton Schools of Engineering. "Sådana förbättringar gör att protesen känns mer bekväm och naturlig för användaren."
Enligt Lai, det är tänkbart att inom en inte alltför avlägsen framtid, Robotar kommer att användas i olika tillämpningar av komplex objekthantering eller kontroll som kräver den typ av koordination och rörelsekontroll som människor gör ganska bra.
Om en robot är designad för att gå med en relativt kort steglängd, då tillåts relativt stora variationer i gångfrekvensen. Dock, om ett längre steg önskas, då bör gångfrekvensen väljas noggrant.
En ny tidning publicerad i Fysisk granskning tillämpas , "Synkron övergång i komplex objektkontroll, "uppstod med Wallace som en del av hans senior designprojekt inom elektroteknik, övervakas av Lai. Wallace har fått ett NSF Graduate Fellowship och är nu doktorand vid ASU:s School of Electrical, Data- och energiteknik.
ASU-teamets forskning expanderar på en banbrytande, virtuell experimentell studie nyligen utförd av forskare vid Northeastern University, använda paradigmet för att hålla kaffekoppar och lägga till en rullande boll, att undersöka hur människor manipulerar ett komplext föremål. Deltagarna roterade medvetet koppen på ett rytmiskt sätt med förmågan att variera kraft och frekvens för att säkerställa att bollen stannade kvar.
Northeastern-studien visade att deltagarna tenderar att välja antingen en lågfrekvent eller en högfrekvent strategi - rytmisk rörelse av koppen - för att hantera ett komplext föremål.
En anmärkningsvärd upptäckt var att när en lågfrekvent strategi användes, svängningarna uppvisar synkronisering i fas, men antifassynkronisering uppstår när en högfrekvensstrategi användes.
"Eftersom både låg- och högfrekvenserna är effektiva, det är tänkbart att vissa deltagare i det virtuella experimentet bytte strategi, " sade Wallace. "Detta väcker frågor.
"Hur sker en övergång från fassynkronisering associerad med en lågfrekvensstrategi till antifassynkronisering associerad med en högfrekvensstrategi, eller tvärtom, " frågade Wallace. "I parameterutrymmet, är gränsen mellan synkroniseringsregimerna i fas och motfas skarp, gradvis, eller sofistikerad?"
ASU-teamets forskning, föranledd av Wallaces nyfikenhet, studerade övergången mellan synkronisering i fas och motfas med hjälp av en ickelinjär dynamisk modell av en pendel fäst vid en rörlig vagn utsatt för yttre periodisk forcering.
Forskarna fann att i den svagt tvingande regimen, eftersom den externa körfrekvensen varieras, övergången är abrupt och sker med resonansfrekvensen, som kan förstås fullt ut med hjälp av linjära systemstyrteorin.
Bortom denna regim, en övergångsregion uppstår mellan synkroniseringen i fas och motfas, där vagnens och pendelns rörelser inte är synkroniserade. Man fann också att det finns bistabilitet i och nära övergångsområdet på lågfrekvenssidan.
Övergripande, resultaten indikerar att människor kan byta abrupt och effektivt från en synkron atttraktor till en annan, en mekanism som kan utnyttjas för att designa smarta robotar för att adaptivt hantera komplexa objekt i en föränderlig miljö.
"Det är möjligt att människor kan använda både i-fas- och antifasstrategier skickligt och att smidigt byta från en strategi till en annan, kanske utan att ens inse det. Resultaten från denna studie kan användas för att implementera dessa mänskliga färdigheter i mjuka robotar med tillämpningar inom andra områden, såsom rehabilitering och gränssnitt mellan hjärna och maskin, " sa Lai.
Dessutom, uppgifter lika triviala som att dra kablar i en bilkaross på ett löpande band – som människor utför med lätthet – undviker fortfarande de mest avancerade maskinerna.
"En systematisk kvantitativ förståelse av hur människor interagerar dynamiskt med sin miljö kommer för alltid att förändra hur vi konstruerar vår värld, och kan revolutionera designen av smarta proteser och inleda en ny tid för tillverkning och automatisering, ", sa Wallace. "Genom att efterlikna de dynamiskt gynnsamma beteenden som antagits av människor vid hantering av komplexa objekt, vi kommer att kunna automatisera processer som tidigare ansågs vara omöjliga."