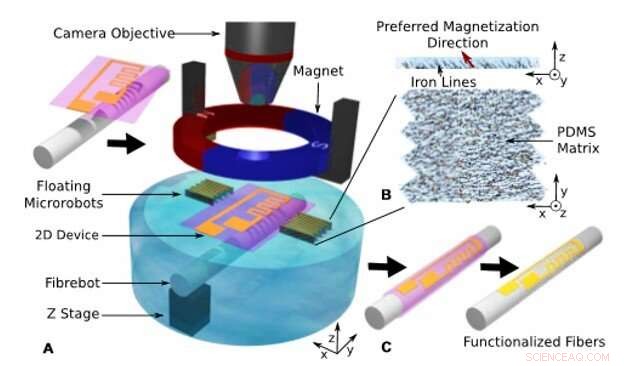
Installation av mikrorobotassisterad våtöverföring med hög precision. (A) Magnetiskt styrda mikrorobotar via en extern magnet för att rikta in en flytande 2D-enhet på ett målsubstrat (t.ex. optisk fiber och 3D-mikroenhet). (B) Vy över mikrorobotstrukturen i vilken järnlinjer fångade i en elastomermatris används för att lagra en föredragen magnetiseringsriktning. (C) Slutmonterade enheter med det funktionella mönstret i linje med en 5-µm och 0,4° precision. Kredit:Science Robotics, doi:10.1126/scirobotics.aax8336
Minimalt invasiv kirurgi används alltmer för att rikta in sig på små lesioner och en växande efterfrågan finns på miniatyriserade medicinska verktyg. Dessa inkluderar mikrokatetrar, ledad mikrotång eller pincett för att känna av och aktivera under precisionskirurgi. Den exakta integrationen och funktionaliseringen av kemiska och fysikaliska sensorer är fortfarande en stor utmaning. I en ny studie om Vetenskapsrobotik , Antoine Barbot och kollegor vid Institute of Medical Robotics i Kina och Hamlyn Center for Robotic Surgery i London utvecklade en ny mikrorobotplattform för att funktionalisera fibrer från 140 till 830 mikrometer (µm). De riktade sedan in de 2 mm x 3 mm och 200 µm tjocka mikrobotarna till flytande elektroniska kretsar på en fiber med hjälp av en våtöverföringsprocess.
Forskarna kontrollerade positionen och orienteringen av mikrorobotarna vid luft-vattengränssnittet med hjälp av en permanentmagnet. Med hjälp av magnetens icke-homogena magnetfält kontrollerade de det exakta avståndet mellan de två mikrorobotarna och underlättade manövrer av "grip och släpp" med flytande elektroniska mönster. Barbot et al. föreslagit en modell för denna kontrollprocess, inklusive interaktioner mellan mikrorobotarna genom ytspänning för detaljerad prestandavalidering. De demonstrerade en mängd exempel på sensorutföranden på en fiber med en diameter på 200 µm och 3D-enheter.
Den kliniska betoningen på förbättrad medicinsk övervakning och diagnos har styrt kirurgins framtid mot precisionsintervention. Den senaste introduktionen av robotverktyg på fibrer för att bilda fiberbots har gjort det möjligt för forskare att kombinera avbildning, avkänning och mikromanipulation inom en enda fiber. Sofistikerade mikrogripare kan konstrueras direkt på spetsen av en fiber med tvåfotonpolymerisation. Forskare kan etablera mikroaktivering med hjälp av hydrauliska länkar som utnyttjar mikrokapillärfunktionen för att använda enheten för riktad läkemedelstillförsel och fokuserad energi som laserablation. Optiska fibrer är ett mångsidigt substrat för att utveckla flexibla mikroverktyg. Deras ytor ger en idealisk plats för att inkludera flera sensorer längs dess längd.
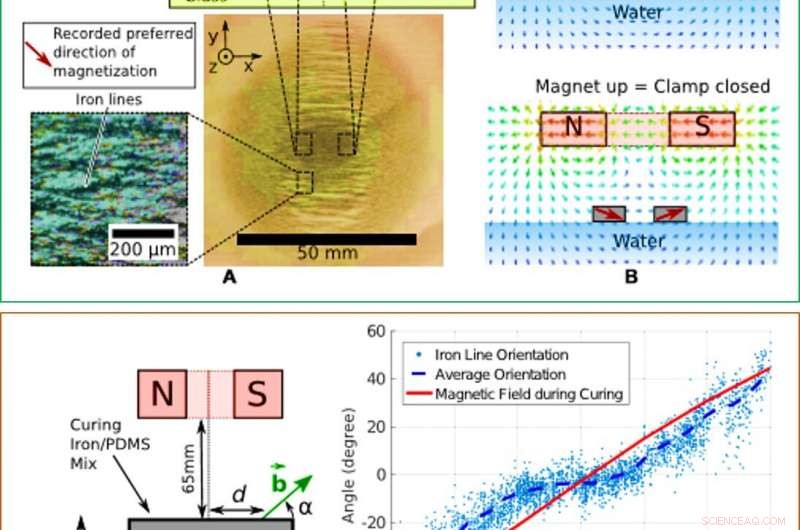
UPP:Flytande mikrorobotar med olika föredragna magnetiseringsriktningar:Tillverknings- och styrprinciper. (A) Tillverkning av mikrorobotar. Olika magnetiseringsriktningar programmerades i materialet med en ringmagnet. (B) Spännmekanism som används i denna studie. Mikrorobotar flyttades tillsammans eller isär beroende på magnetens vertikala position, möjliggör effektiv fastspänning av mönstret som ska överföras, följt av rotations- och orienteringskontroll. UNDAN:Järnlinjeorientering inuti PDMS-matrisen. (A) Micro-CT-rekonstruktion av polymer/järn-blandningen. Järnlinjerna var i linje med magnetfältets riktning under polymerhärdningen. (B) Järnlinjens riktning kontra position. Riktningen för järnlinjerna följde det härdande magnetfältets riktning. Kredit:Science Robotics, doi:10.1126/scirobotics.aax8336
Dock, direkt mönstring av mikroelektronik på små, böjda föremål som används för kliniska tillämpningar är utmanande, eftersom befintliga mikrotillverkningsprocesser i första hand är skräddarsydda för plana substrat. Forskare har hittills använt två huvudsakliga överföringsmetoder; inklusive torröverföring och våtöverföringstekniken. Torr överföring ger vanligtvis bättre renhet och högre precision jämfört med våt överföring på grund av frånvaron av vått etsmedel och vätskestörningar. Våtöverföringstekniker som sannolikt kommer att inträffa vid kirurgiska ingrepp är begränsade av svårigheter att exakt positionera och ösa flytande anordningar. Detta beror på bristen på precisionsverktyg eller robotplattformar för ett exakt praktiskt tillvägagångssätt. Mikrorobotmanipulatorer kan därför ta itu med några av de stora problem som manuella våtöverföringsmetoder står inför.
I detta arbete, Barbot et al. föreslog användning av mobila mikrorobotar vid luft/vatten-gränssnittet för att exakt kontrollera mönsterrörelsen under våtöverföring. För att underlätta enkel och exakt kontroll, forskarna föreslog att man skulle utveckla ett par mikrorobotar för att förstå flytande mönster. De uppnådde detta med hjälp av ett magnetfält som genereras med en enda permanentmagnet kopplad för att ställa in magnetiseringsriktningen för robotens beståndsdelar. Barbot et al. använde interaktionen mellan mikrorobotarna och magnetfältet för att placera mikrorobotparet på två olika platser i luft/vatten-gränssnittet och bilda en gripare.
Mikrorobotbaserad mönstergrepp och manipulation. Kredit:Science Robotics, doi:10.1126/scirobotics.aax8336
Forskarna kontrollerade avståndet mellan de två mikrorobotarna genom att kontrollera avståndet mellan enheten och magneten. De konstruerade enheterna med en elastomer och polydometylsiloxan (PDMS) blandat med järnpulver. För ett givet experiment, Barbot et al. magnetiserade varje mikrorobot för att reagera på liknande sätt på ett givet magnetfält. Forskarna använde ett 200 µm lager av PDMS och järnblandningen under påverkan av ett svagt magnetfält för att montera järnlinjer i PDMS-matrisen. De termiskt härdade PDMS för att hålla järnlinjestrukturerna på plats och utvärderade orienteringen av produkten med hjälp av röntgenmikrotomografi.
Forskarna utvecklade par av mikrorobotar med anpassade magnetiseringsriktningar med hjälp av olika delar av järn/PDMS-skikten för att bilda rektangulära robotar som mäter 2 mm gånger 3 mm vid 200 µm tjocklek. De lade till små tandliknande strukturer till mikrorobotarna för att begränsa mönstrets rörelse under greppprocesser. Teamet observerade positionerna för olika mikrorobotpar och deras respektive svar på olika vertikala positioner av magneten för att få två rörelsemönster för mikrorobotparen, beroende på vinkeln (α) mellan deras magnetisering och horisontalplanet.
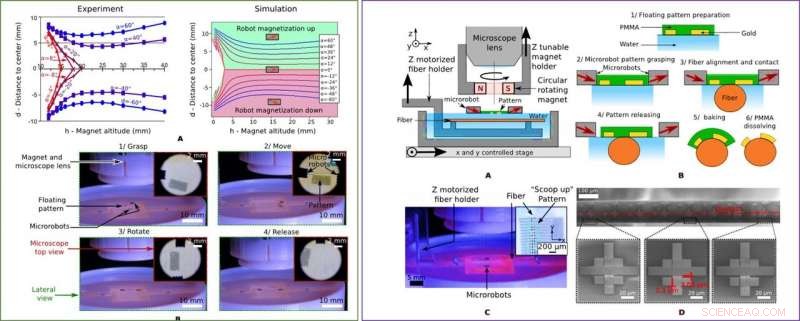
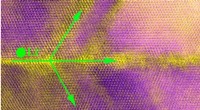
VÄNSTER:Magnetisk styrning av mikrorobotparet. (A) Olika jämviktspositioner för mikrorobotparet som påverkas av magnetens vertikala position. Till vänster:Experimentresultat. Höger:Simuleringsresultat erhållna med finita elementmodellering av magnetfältet. (B) Optiska bilder som visar mikrorobotparet som manipulerar ett flytande mönster. HÖGER:Fibermönster med mikrorobotassisterad våtöverföring. (A) Sidovy av överföringspoolen med mikrorobotparet som håller ett mönster som ska överföras. (B) Tillverkningsarbetsflöde för mönstring av Au-mikroenheter på fibern med den föreslagna mikrorobotassisterade våtöverföringen. (C) Flytande mönster (rutnätsstrukturer) överfört till en optisk fiber med 200 µm diameter sett från mikroskopet. (D) Svepelektronmikroskopi (SEM) (Tescan SEM/FIB LYRA3 XM) bilder av två på varandra följande överföringspositionsmarkörer för att bedöma den uppnåbara överföringsnoggrannheten för det föreslagna systemet. Kredit:Science Robotics, doi:10.1126/scirobotics.aax8336
Barbot et al. designade mikrorobotarna och lät magnetens höjd styra avståndet mellan de två robotarna och reglera öppning och stängning av mikrorobotgripare. Forskarna jämförde experimentresultaten med en simulering för att förstå interaktionen mellan mikrorobotarna. De observerade fyra frihetsgrader (DOF) för att kontrollera mikrorobotparen. Dessa inkluderade grepp (en DOF), positionering (två DOF) och orienteringar (en DOF) under våt överföring. Forskarna manipulerade det flytande mönstret med dessa fyra kontrollerbara ingångar. De karakteriserade magnetiseringsegenskapen hos järn/PDMS-blandningen som en allmän guide för konsekventa mikrorobotdesigner.
Under experimenten, teamet sänkte först magneten för att flytta isär mikrorobotarna och placera dem runt målmönstret. De höjde sedan magneten för att stänga gapet mellan mikrorobotarna och greppa mönstret för efterföljande inriktning mot målfibersubstratet. Gripkraften hos mikrorobotarna orsakade ingen deformation av mönstret. Till sist, de sänkte magneten igen för att griparen skulle släppa mönstret och flytta bort robotparet. Med hjälp av inställningen, forskarna utförde våtöverföring av det flytande mönstret till en optisk fiber. Under sex-steget, mikrorobottillverkningsprocess, forskarna överförde godtyckliga guldmönster (Au) som elektroder eller töjningsmätare till fibern. För att förstå precisionen i mönsteröverföring, de mätte skiftet mellan två komplementära mönster avsatta på fibern. Barbot et al. observerade utmaningar för långvarig mönstervidhäftning på krökta kontaktställen för fibern.
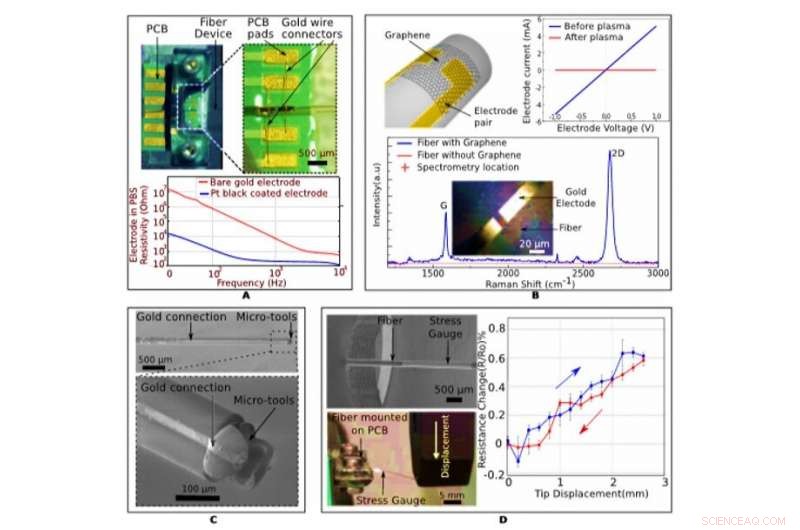
Exempel på tillämpningar av mikrorobotassisterad våtöverföring för fiberfunktionalisering. (A) Överst:Gränssnitt mellan fiberstödda elektroder och en dedikerad PCB. Nederst:Impedanskarakterisering av en tvåelektrodsanordning med och utan elektrodoppsättning av Pt-svart. (B) Fiberbaserade 2D-grafenenheter. Sekventiella våta överföringar gjordes för att successivt mönstra Au-spåret och sedan grafenfilmen. Förekomsten av grafen bedömdes med Raman-spektrometri och ett plasmadestruktivt test. (C) SEM-bild av ett funktionaliserat mikroverktyg 3D-utskrivet till spetsen av en fiber. Au-spåret anpassades och överfördes till 3D-strukturen med god överensstämmelse. (D) Fiberbaserad töjningsmätare utformad för att mäta fiberdeformation baserat på dess resistivitetsförändring. SEM-bild av enheten, bild på upplevelsen, och resulterande signal. Kredit:Science Robotics, doi:10.1126/scirobotics.aax8336
Teamet optimerade den föreslagna mikrorobotassisterade våtöverföringsmetoden för att konstruera en mängd olika enheter. De bildade elektroniska enheter genom att överföra fibrer med mönster till ett kretskort och realiserade elektriska anslutningar med hjälp av 25 µm Au-trådar. De bildade sådana elektrokemiska sensorer för potentiella tillämpningar i mikrokatetrar och andra implanterbara enheter. Forskarna demonstrerade också tillverkningstekniken med flera lager av olika material för att bilda en tvåterminal grafenenhet på en glasfiber med en diameter på 200 µm. De valde grafen på grund av materialets unika elektrodegenskaper. De använde metoden för att integrera aktiva elektromekaniska enheter på 3D-substrat, följt av mönstring på komplexa 3D-strukturer. Till exempel, de överförde ett Au-mönster på ett mikroverktyg med 170 µm glaskapillärfiberspets (konstruerad med tvåfotonlitografi). Arbetet kommer att bana väg för att konstruera komplexa elektromekaniska enheter i mikroskala med hjälp av hybridmikrotillverkningstekniker med breda tillämpningar under exakt klinisk biomarkördetektering och precisionskirurgi.
På det här sättet, Antoine Barbot och ett team av tvärvetenskapliga forskare presenterade en praktisk lösning för våtöverföring av tunna filmer och 2D-kristaller med precision på mikrometernivå på 3D-substrat. De utvecklade en flytande magnetisk mikrorobot som kan lagra en föredragen magnetiseringsriktning för att manipulera dem under ett permanent magnetfält. Forskargruppen finjusterade robotens mikrogripare genom att justera magnetens position för att greppa, rikta in och släpp flytande 2D-mönster.
Den föreslagna inställningen är enkel, reproducerbar och pålitlig. Den nya tillverkningstekniken kommer att öppna nya applikationer inom interventionell kirurgi med elektrokemiska sensorer, mikroaktuatorer och komplexa 2D elektroniska enheter. Framtidsfokus för Barbot et al. kommer att inkludera tekniska hierarkiska anordningar baserade på flerskiktiga van der Waals 2-D-kristaller för att integrera aktiva komponenter på fiberspetsar och slutligen bilda aktiverings- och avkänningskapacitetsdrivna fiberbots i nanoskala eller mikroskala.
© 2019 Science X Network