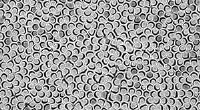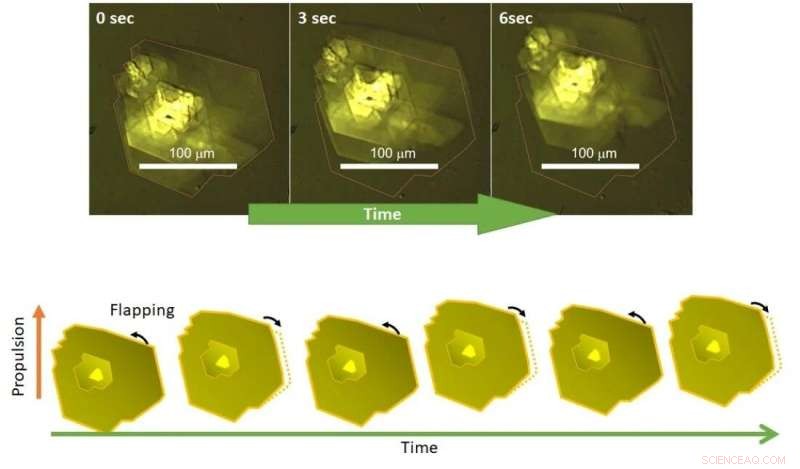
(Ovan) En serie ljusmikrofotografier som visar rörelsen hos en av de syntetiserade mikrorobotarna i denna studie; (Nedan) En representation av fenans rörelse över tid (Kazuma Obara, Yoshiyuki Kageyama, Sadamu Takeda. Small. 27 november 2021). Kredit:Kazuma Obara, Yoshiyuki Kageyama, Sadamu Takeda. Små. 27 november 2021
Att skapa molekylära mikrorobotar som efterliknar förmågan hos levande organismer är en dröm om nanoteknik, vilket illustreras av den välrenommerade fysikern Richard Feynman. Det finns ett antal utmaningar för att uppnå detta mål. En av de viktigaste av dessa är skapandet av riktad självframdrivning i vatten.
Ett team av tre forskare från Hokkaido University, ledda av assisterande professor Yoshiyuki Kageyama, har lyckats skapa en mikrokristall som använder självständig fram- och återgående rörelse för framdrivning. Deras resultat publicerades i tidskriften Small .
Drömmen om mikrorobotar är en gammal, efter att ha behandlats inom science fiction i många decennier och populariserats av nanoteknikens framväxt. En aspekt av dessa robotar är självframdrivning, förmågan att förflytta sig självständigt. Det finns två stora utmaningar för att uppnå detta:den första är att göra en molekylär robot som kan deformeras ömsesidigt, och den andra är att omvandla denna deformation till framdrivning av den molekylära roboten.
Kageyamas grupp byggde på sin tidigare forskning som hade löst den första utmaningen – skapandet av molekylära robotar som kan deformeras ömsesidigt. Emellertid kan små föremål inte omvandla sin ömsesidiga rörelse till progressiv rörelse, i allmänhet, vilket förklaras av Edward Purcells kammusslasats. I den aktuella studien gick forskarna till nästa steg och lyckades förverkliga självframdrivning av den molekylära roboten i ett experimentellt system där rörelsen var begränsad till två dimensioner; i detta system verkar viskös resistens anisotropiskt, vilket gör det försumbart svagt.
Mobila molekylära robotar simmar i vatten
Mikroroboten drevs av blått ljus, vilket drev en rad reaktioner som ledde till att fenan vände och framdrivningen. På grund av reaktionernas karaktär var rörelsen inte kontinuerlig, utan inträffade intermittent; dessutom uppvisade de molekylära robotarna en av tre olika framdrivningsstilar:en "stroke"-stil, med fenan framför; en "kick" stil, med fenan bakom; eller en "side-stroke"-stil, med fenan åt sidan. Rörlighetens natur påverkades av fenans område och dess höjdvinkel; individuella kristaller drev sig själva i olika riktningar och stilar.
Forskarna skapade sedan en beräkningsminimimodell för att förstå de variabler som påverkade framdrivningen i en tvådimensionell tank. De kunde fastställa att fenans längd, fenförhållande och höjdvinkel var nyckelvariablerna som påverkade framdrivningarnas riktning och takt.
"Resultatet, som visade att små klaffar kan simma med hjälp av anisotropin som orsakas av trånga utrymmen, kan stimulera forskning om molekylära robotar", säger Kageyama. "En liknande mekanism kan vara i förflyttning av små vattenlevande organismer under specifika förhållanden som inuti ägg." + Utforska vidare