 Krossar obemannat markfordon Foto med tillstånd Carnegie Mellon, National Robotics Engineering Center
Krossar obemannat markfordon Foto med tillstånd Carnegie Mellon, National Robotics Engineering Center Crusher gjorde sin debut i äkta monster-truck-stil:De två prototyperna kom in i en Carnegie Mellon University-byggnad för att skrälla musik och blinkande lampor. En kross stod där medan dess motsvarighet fortsatte att rulla över och krossa högar med bilar som skulle få de flesta monsterbilar att backa med svansen mellan benen. Kross är ingen typisk lastbil. Den kan köra rakt över en 4 fot vertikal vägg medan den bär 8, 000 pund last.
Kross är en obemannat markfordon ( UGV ) finansierat av DARPA och designat av Carnegie Mellons National Robotics Engineering Center ( NREC ). Kraften i Crusher-projektet-som bygger på en annan NREC-designad UGV som heter Spinner (Crusher kallas ibland Spinner version 2.0 )-är i stort sett drivkraften för all militärfinansierad forskning och utveckling i UGV-världen just nu:ökad uppfattningsförmåga, autonomi och robusthet. Den amerikanska armén skulle vilja få saker mer än en obemannad, tyst tank som kan bära obegränsad nyttolast, försvara sig mot fienden och snabba obehindrat över terräng som skulle få Hummer att krypa ihop i fosterställning.
Krossen kommer förmodligen aldrig att se massproduktion. Kostnaden skulle vara för hög (designers citerar inte ens ett nummer). Det är utformat som en fungerande prototyp för att testa olika tekniker som NREC utvecklar som en del av ett program som heter UPI .
UPI står för U nmanned Ground Combat Vehicle P erceptOR (off-road) I integration, en DARPA-finansierad munsbit som omfattar experiment för att "bedöma kapaciteten i stor skala, obemannade markfordon (UGV) som arbetar autonomt i ett brett spektrum av komplexa, terrängterräng "[ref]. 6,5-tonskrossen väger nästan 30 procent mindre än Spinner och kan bära mer last. Det enda NREC lämnade kvar av Spinners uppgradering är möjligheten att fortsätta att köra om den vänds upp och ner Inget ord om varför den coola funktionen försvann, även om logiken skulle föreslå att det antingen var att göra några av Crushers andra uppgraderade funktioner möjliga eller att minska en högkostnadskapacitet som kanske inte är avgörande för UPI:s huvuduppdrag.
Så, vad kan Crusher göra?
 Foto med tillstånd Carnegie Mellon, National Robotics Engineering Center
Foto med tillstånd Carnegie Mellon, National Robotics Engineering Center Enligt NREC, Crusher-tekniken är sex till tio år från den verkliga implementeringen. Medan den är mindre, mänskligt kontrollerade robotar har redan tagit sig till slagfältet (se hur militära robotar fungerar), massiv, obemannade robotar som Crusher finns fortfarande i laboratorier. Komplexiteten i de uppfattnings- och styrsystem som är nödvändiga för att en storskalig robot ska hantera okänd terräng och förhållanden är fortfarande i forsknings- och utvecklingsstadiet. Crusher's perception- och navigationssystem är prototyper avsedda som testplattformar för alltmer innovativa metoder för markstridsfordon som inte kräver mänsklig insats för att utföra sitt uppdrag.
I nästa avsnitt, vi tar en titt på några av dessa system. Eftersom Crusher först och främst är ett militärt projekt, fullständiga detaljer är inte tillgängliga för allmänheten, men HowStuffWorks har ändå lyckats ta reda på lite intressant information.
 Krossprototyper Foto med tillstånd Carnegie Mellon, National Robotics Engineering Center
Krossprototyper Foto med tillstånd Carnegie Mellon, National Robotics Engineering Center Det finns tre huvudfokusområden i Crushers utveckling:
Krossens skelett är tillverkat av aluminium och titan. Dess skrov är en aluminium rymdram (en öppen struktur av vevstänger) med extremt robusta titanoder som förenar stavarna för ökad styrka vid trolig kollision med stora, hårda föremål. Omedelbart nedanför skrovet är en skidplatta - i princip en upphängd, chockmonterad "stötfångare" av stål som står som ett första försvar, skydda skrovet från första kontakt med stenblock, trädstubbar och steg.
 Foto med tillstånd Carnegie Mellon, National Robotics Engineering Center
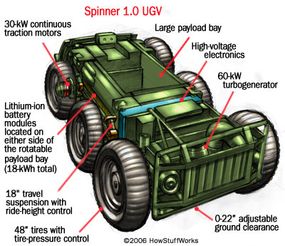
Foto med tillstånd Carnegie Mellon, National Robotics Engineering Center För att hålla den i rörelse över hinder och allmänt ovänlig terräng, Krossen har ett sexhjul, fyrhjulsdriftssystem som drivs av a hybrid dieselelektrisk installation som möjliggör nästan tyst drift - en praktisk egenskap vid rekonstruktion. 78 hästkrafter, turbo-dieselmotor fungerar som en generator i systemet, utmatning av en kontinuerlig effekt på 58 kilowatt (kW) för att ladda Crusher 300 volt, 18,7 kW, litiumjonbatteri. Batterierna kör i sin tur sex 210 kW elmotorer, en i var och en av de sex hjulnaven. Varje motor producerar 282 hästkrafter. Liksom de flesta hybridelektriska system, Krossen använder regenerativ bromsning för att återföra lite ström till batterierna varje gång den bromsar (se hur hybridbilar fungerar för att lära sig om regenerativ bromsning). Fordonet kan köras på tyst batteri ensam i 3 till 16 km beroende på hastighet och lastlast.
Eftersom varje hjul drivs oberoende av varandra, om en eller två dör, Krossen kan fortsätta. Den behöver bara fyra av de sex hjulen för att behålla sin kapacitet. Och om det befinner sig i ett plötsligt behov av en vändning - säg, omgiven på tre sidor av oöverstigliga hinder - den kan använda sin glidstyrning , en svängradie på noll, att snabbt om-ansikte utan vickelrum alls.
För att passa under lågt hängande hinder, möta stenig terräng eller bättre gömma sig för fienden, Krossen har en justerbar körhöjd på noll till 30 tum (76 cm). Förutom höjdjustering, Krossens upphängning kan resa hela 30 tum för att absorbera stötar, och den har justerbar styvhet för olika markförhållanden. Vi kunde hitta en vy under huven av Spinner, Crusher's föregångare - kom ihåg att Crusher är en uppgraderad version av Spinner 1.0:
 Krossen har uppgraderingar i körhöjdsjustering, fjädring, fordonets vikt och lastkapacitet.
Krossen har uppgraderingar i körhöjdsjustering, fjädring, fordonets vikt och lastkapacitet. Krossens kraftfulla ram, sexhjulsdriven installation och extrema fjädringsmöjligheter gör att UGV kan resa i höga hastigheter, för närvarande upp till 42 km / h, över svår terräng, mot hinder som diken, stenblock, branta lutningar och vertikala barriärer upp till 4 fot, allt utan att missa ett slag.
Robusthet, kraft och tystnad gör Crusher till ett idealiskt scoutverktyg, men det är främst UGV:s autonomisystem som DARPA hittills har betalat ut 35 miljoner dollar för att utveckla. NREC har inte släppt mycket detaljerad information om UPI -systemet, men säger att "denna teknik sprider avkänningsförmåga över hela fordonet för att hjälpa till att balansera sin uppfattning och även stödja fordonsområden som kanske är mindre skickliga att känna av miljön. [avkänning] -programvaran kommer också att låta Crusher" lära "och tillämpa tidigare insamlad information mot nya hinder. "
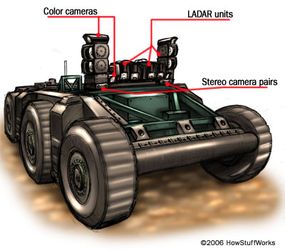
Vi vet att uppfattningshårdvaran huvudsakligen består av LADAR (laserdetektering och intervall) enheter och kameramatriser . En LADAR -enhet skickar ut en laserstråle för att skanna ett område och mäter hur lång tid det tar för strålen att reflekteras tillbaka till enhetens lasersensor. Crusher har åtta av dessa enheter - fyra skannar miljön horisontellt och fyra skannar vertikalt. Den använder sex par stereokameror för djupuppfattning och fyra färgkameror för att applicera en färgpixel på varje distanspunkt som bestäms av LADAR-sensorn.
 Tidig version av Crusher's perception system
Tidig version av Crusher's perception system Den senaste inkarnationen av Crusher har en 18 fot teleskopmast för att samla in data från en högre utsiktspunkt. Masten kan innehålla delar av LADAR och kameramenhet sett ovan, eller så kan det helt enkelt lägga till en extra uppsättning sensorer i uppfattningssystemet.
 Foto med tillstånd Carnegie Mellon, National Robotics Engineering Center
Foto med tillstånd Carnegie Mellon, National Robotics Engineering Center Med alla LADAR- och kameradata kombinerade, Krossar inbyggd CPU skapar en 3D-bild av landskapet där Crusher färdas. CPU:n är en 700 MHz Pentium 3 som styr Crushers mekaniska aktiviteter och kör navigationsprogrammet som hanterar sensordatabehandling. Ett tröghetsmätningsenhet ( IMU ) upptäcker Crusher's höjd, position och rörelseriktning med en kombination av accelerometrar (lutningsgivare) och gyroskop, så Crusher är alltid medveten om sin egen rörelse och position i förhållande till landskapet. UGV har också en inbyggd GPS-mottagare och datorbaserad GPS-databas som innehåller förprogrammerade terrängdata.
Än så länge, fältförsök har visat att Crusher är på god väg till verklig autonomi. Vid testning, Krossen flyttade från GPS -waypoint till GPS -waypoint med avstånd mer än 1 km från varandra utan någon extern kontroll. Med hjälp av sina uppfattnings- och navigationssystem, Krossen kan reagera på hinder i farten - den behöver inte en operatör för att berätta vad den ska göra när den träffar något. Den kan klättra uppför en lutning större än 40 grader, köra rakt över ett 4-fotsteg och korsa en 80-tums skyttegrav med sina egna beslutsfattande möjligheter. Grävkorsningsförmågan är särskilt cool - krossens däck är monterade på ett sådant sätt att de kan falla ner för att stödja fordonet medan det korsar ett gap.
 Foto med tillstånd Carnegie Mellon, National Robotics Engineering Center
Foto med tillstånd Carnegie Mellon, National Robotics Engineering Center Krossar specifikationer :
Storleks- och viktspecifikationerna innebär att ett enda C-130H-lastplan kan bära två krossar i strid var som helst i världen. I augusti 2006, Krossen har utrustats med ett Rafael Mini Typhoon -fäste som rymmer ett 0,50 kaliber gevär, pekar på möjligheten att stridsroller kan bli ett allt mer framträdande fokus i utvecklingen av autonomiteknik för militära fordon. I nästa avsnitt, Vi tar en titt på framtiden för Crusher -prototypen och tar reda på hur den passar in i den övergripande trenden inom militär forskning och utveckling.
 Foto med tillstånd Carnegie Mellon, National Robotics Engineering Center
Foto med tillstånd Carnegie Mellon, National Robotics Engineering Center Från och med 2006, den amerikanska militären har utplacerat cirka 4, 000 stridsrobotar för aktiv tjänst. Militären använder dessa robotar i första hand för att "nosa ut" bomber och rensa byggnader och andra slutna strukturer. Arméns Framtida stridsystem ( FCS ) -programmet vill spendera cirka 300 miljoner dollar för att finansiera uppdateringar för att utöka rollerna för slagfältrobotar. FCS söker robotmulor som kan transportera last tillsammans med trupper över ojämn terräng och mycket större obemannade fordon som inte kan arbeta utan mänsklig insats till scoutområden och patrullera gränser, skicka avgörande data tillbaka till trupperna. Om dessa stora, autonoma fordon kan också bära stora nyttolaster över svår terräng utan att tappa hastighet, det skulle vara en extra bonus. Kross eller något liknande skulle vara idealiskt i de senare rollerna.
Krossen själv kommer förmodligen inte att se distributionen. Det är mestadels ett forskningsprojekt och kommer att testas och experimenteras fram till 2008. Då, NREC kommer att överlåta krosstekniken till DARPA så att den kan tillämpas på relaterade projekt, varav de flesta faller under området Future Combat System. FCS driver utvecklingsprogram som Armed Reconnaissance Vehicle (ARV), som syftar till att förverkliga ett helt autonomt, stridsklar fordon för spaningsuppdrag; och det autonoma navigationssystemet (ANS), ett övergripande program för att utveckla autonomi för gemensamma plattformar för ett brett spektrum av militära robotar. Det övergripande målet för FCS är sömlös integration av både bemannade och obemannade fordon, mark och luft, till en struktur som kan hanteras via en enda, webbliknande styrsystem.
Med FCS, vi kan se krossliknande fordon som stöder trupper i stridsoperationer om fem till tio år. De kommer sannolikt att börja i spaningsroller och sedan övergå till strid, stödjande trupper i stället för att ersätta dem. Men Crushers banbrytande autonomiteknik är inte militärspecifik. NREC föreställer sig - och har på gång - forskningsprojekt som använder de system som utvecklats för Crusher i civila applikationer. På ett decennium, vi kunde se autonoma fordon som utför riskfyllda uppgifter inom områden som jordbruk, gruvdrift och konstruktion, i slutändan överföra en del av den fara som människor står inför på dessa områden till utbytbara robotmotstycken som inte känner någon smärta.
För mer information om Crusher, UGV och relaterade ämnen, kolla in länkarna på nästa sida.
Källor














