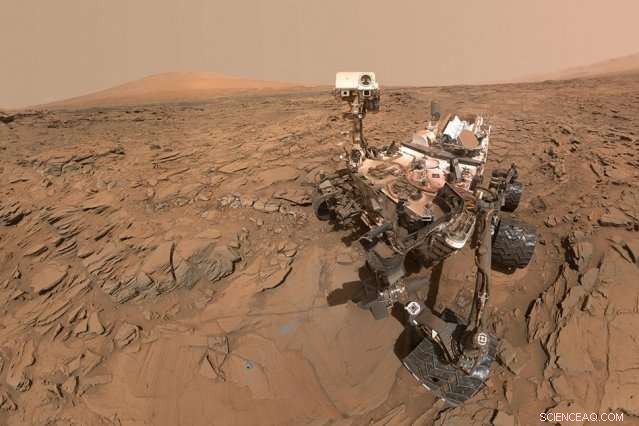
Ett självporträtt av NASA:s Curiosity Mars-rover. Kredit:NASA/JPL-Caltech/MSSS
Att välja en landningsplats för en rover på väg till Mars är en lång process som normalt involverar stora kommittéer av forskare och ingenjörer. Dessa kommittéer ägnar vanligtvis flera år åt att väga ett uppdrags vetenskapliga mål mot ett fordons tekniska begränsningar, att identifiera platser som är både vetenskapligt intressanta och säkra att landa på.
Till exempel, ett uppdrags vetenskapsteam kanske vill utforska vissa geologiska platser efter tecken på vatten, liv, och beboelighet. Men ingenjörer kan upptäcka att dessa platser är för branta för att ett fordon ska kunna landa säkert, eller så får platserna inte tillräckligt med solljus för att driva fordonets solpaneler när det väl har landat. Att hitta en lämplig landningsplats innebär därför att sammanfoga information som samlats in under åren av tidigare Mars-uppdrag. Dessa data, även om de växer för varje uppdrag, är ojämn och ofullständig.
Nu har forskare vid MIT utvecklat ett mjukvaruverktyg för datorstödd upptäckt som kan hjälpa uppdragsplanerare att fatta dessa beslut. Den producerar automatiskt kartor över gynnsamma landningsplatser, använda tillgängliga data om Mars geologi och terräng, samt en lista över vetenskapliga prioriteringar och tekniska begränsningar som en användare kan specificera.
Som ett exempel, en användare kan bestämma att en rover ska landa på en plats där den kan utforska vissa geologiska mål, såsom sjöar med öppna bassänger. På samma gång, landningsplatsen bör inte överstiga en viss lutning, annars skulle fordonet välta när det försökte landa. Programmet genererar sedan en "favorability map" över landningsplatser som uppfyller båda begränsningarna. Dessa platser kan skifta och förändras när en användare lägger till ytterligare specifikationer.
Programmet kan också ange möjliga vägar som en rover kan ta från en given landningsplats till vissa geologiska särdrag. Till exempel, om en användare anger att en rover ska utforska sedimentära stenexponeringar, programmet producerar vägar till sådana närliggande strukturer och beräknar den tid det skulle ta att nå dem.
Victor Pankratius, huvudforskare vid MIT:s Kavli Institute for Astrophysics and Space Research, säger uppdragsplanerare kan använda programmet för att snabbt och effektivt överväga olika landnings- och utforskande scenarier.
"Det här kommer aldrig att ersätta den faktiska kommittén, men det kan göra saker mycket mer effektivt, eftersom du kan leka med olika scenarier medan du pratar, säger Pankratius.
Teamets studie publicerades online den 31 augusti av Jord- och rymdvetenskap och är en del av tidskriftens onlinenummer den 8 september.
Nya sajter
Pankratius och postdoc Guillaume Rongier, i MIT:s Department of Earth, Atmosfärs- och planetvetenskap, skapade programmet för att identifiera gynnsamma landningsplatser för ett konceptuellt uppdrag som liknar NASA:s Mars 2020 -rover, som är konstruerad för att landa horisontellt, även, dammfria områden och syftar till att utforska en uråldrig, potentiellt beboelig, plats med magmatiska hällar.
De fann att programmet identifierade många landningsplatser för rover som har övervägts tidigare, och det lyfte fram andra lovande landningsplatser som sällan föreslogs. "Vi ser att det finns platser vi kan utforska med befintlig roverteknologi, som landningsplatskommittéer kanske vill ompröva, " säger Pankratius.
Programmet kan också användas för att utforska tekniska krav för framtida generationer av Mars-rovers. "Förutsatt att du kan landa i brantare kurvor, eller kör snabbare, sedan kan vi ta reda på vilka nya regioner du kan utforska, "Säger Pankratius.
En suddig landning
Programvaran förlitar sig delvis på "fuzzy logic, "ett matematiskt logikschema som grupperar saker inte på ett binärt sätt som boolesk logik, som ja/nej, sant falskt, eller säker/osäkra, men i en mer flytande, sannolikhetsbaserat sätt.
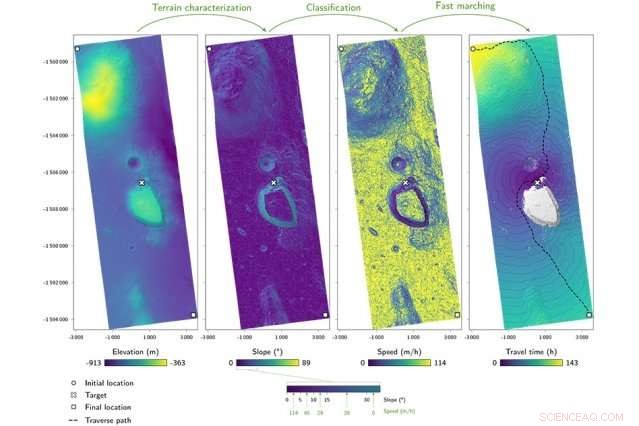
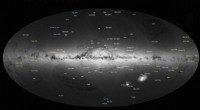
Figuren visar de på varandra följande stegen för att efterlikna en rover som kör runt Mars. MIT-forskare utvecklade en metod för att först karakterisera terrängen över det intressanta området. Baserat på den karaktäriseringen och roverns egenskaper, de använder en "snabbmarsch"-algoritm för att uppskatta roverhastigheten, som de använder för att beräkna tiden det tar att köra någonstans över det området. De kan också uppskatta den kortaste vägen från en första plats, till ett mål, till en slutlig plats. Kredit:NASA/JPL/University of Arizona, Guillaume Rongier
"Traditionellt kommer denna idé från matematiken, där istället för att säga att ett element tillhör en mängd, Ja eller nej, fuzzy logic säger att det hör med en viss sannolikhet, " vilket återspeglar ofullständig eller oprecis information, Pankratius förklarar.
I samband med att hitta en lämplig landningsplats, programmet beräknar sannolikheten att en rover kan klättra en viss sluttning, med sannolikheten minskar när en plats blir mer brant.
"Med suddig logik kan vi uttrycka denna sannolikhet rumsligt - hur illa är det om jag är så brant, kontra denna branta, " säger Pankratius. "Det är ett sätt att hantera oprecision, på ett sätt."
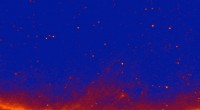
Använda algoritmer relaterade till fuzzy logik, laget skapar rå, eller initial, gynnsamma kartor över möjliga landningsplatser över hela planeten. Dessa kartor är indelade i enskilda celler, var och en representerar cirka 3 kvadratkilometer på Mars yta. Programmet beräknar, för varje cell, sannolikheten att det är en gynnsam landningsplats, och genererar en karta som är färggraderad för att representera sannolikheter mellan 0 och 1. Mörkare celler representerar platser med en sannolikhet nära noll att vara en gynnsam landningsplats, medan lättare platser har en högre chans till en säker landning med intressanta vetenskapliga utsikter.
När de väl har skapat en rå karta över möjliga landningsplatser, forskarna tar hänsyn till olika osäkerheter i landningsplatsen, såsom förändringar i banan och potentiella navigationsfel vid nedstigning. Med tanke på dessa osäkerheter, programmet genererar sedan landningselipser, eller cirkulära mål där en rover sannolikt kommer att landa för att maximera säkerheten och vetenskaplig utforskning.
Programmet använder också en algoritm som kallas snabb marsch för att kartlägga vägar som en rover kan ta över en viss terräng när den väl har landat. Snabb marsch används vanligtvis för att beräkna utbredningen av en front, till exempel hur snabbt en vindfront når stranden om den färdas med en given hastighet. För första gången, Pankratius och Rongier tillämpade snabb marsch för att beräkna en rovers restid när den färdas från en startpunkt till en geologisk struktur av intresse.
"Om du är någonstans på Mars och du får den här bearbetade kartan, du kan fråga, 'Härifrån, hur snabbt kan jag gå till någon punkt i min omgivning? Och den här algoritmen kommer att berätta för dig, " säger Pankratius.
Algoritmen kan också kartlägga rutter för att undvika vissa hinder som kan sakta ner en rovers resa, och kartlägga sannolikheter för att träffa vissa typer av geologiska strukturer i ett landningsområde.
"Det är svårare för en rover att köra genom damm, så det går långsammare, och damm är inte nödvändigtvis överallt, bara i fläckar, Rongier säger. "Algorithmen kommer att överväga sådana hinder när de kartlägger de snabbaste traversvägarna."
Teamen säger att operatörer av nuvarande rovers på Mars-ytan kan använda programvaran för att styra fordonen mer effektivt till platser av vetenskapligt intresse. I framtiden, Pankratius föreställer sig att denna teknik eller något liknande ska integreras i allt mer autonoma rovers som inte kräver att människor kör fordonen hela tiden från jorden.
"En dag, om vi har helt autonoma rovers, de kan ta hänsyn till alla dessa saker för att veta vart de kan gå, och kunna anpassa sig till oförutsedda situationer, " säger Pankratius. "Du vill ha autonomi, annars kan det ta lång tid att kommunicera fram och tillbaka när man måste fatta kritiska beslut snabbt."
Teamet undersöker också tillämpningar av teknikerna för utforskning av geotermiska platser på jorden i samarbete med MIT Earth Resources Lab i Department of Earth, Atmosfärs- och planetvetenskap.
"Det är ett mycket liknande problem, " säger Pankratius. "Istället för att säga 'Är det här en bra sida, Ja eller nej?' du kan säga, "Visa mig en karta över alla områden som sannolikt skulle vara genomförbara för geotermisk utforskning."
Allt eftersom data förbättras, både för Mars och för geotermiska strukturer på jorden, han säger att den data kan matas in i det befintliga programmet för att ge mer exakta analyser.
"Programmet kan förbättras stegvis, " han säger.
Den här historien återpubliceras med tillstånd av MIT News (web.mit.edu/newsoffice/), en populär webbplats som täcker nyheter om MIT-forskning, innovation och undervisning.