Kredit:3000ad, Shutterstock
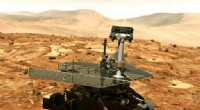
Ända sedan den första framgångsrika landningen på Mars på 1970-talet, forskare har strävat efter att fördjupa sin kunskap om den röda planetens yta. Den första framgångsrika rover, Sojourner, utplacerades på Mars yta i juli 1997. Sedan dess, det har funnits ytterligare tre framgångsrika robotstyrda rovers på planeten, samla in information om vatten, stenar, jordar och mineraler, och närvaron av organiskt material.
Dock, om drömmen om att landa ett mänskligt uppdrag på Mars någonsin ska gå i uppfyllelse, då måste roverteknologin gå framåt med stormsteg. Hittills, rovers har saknat de möjligheter som behövs för att främja utforskning och stödja mänsklig närvaro på Mars. För en, de har ingen autonomi. Det går inte att utvärdera de omgivande riskerna, de måste vänta på att kommandon ska skickas från jorden. De kan också bara färdas några tiotals meter i en sol (soldagen på Mars) och hålla sig till förutbestämda vägar, potentiellt saknade webbplatser med värdefull information.
Forskare som arbetar med det EU-finansierade PERASPERA-projektet antog utmaningen att skapa rovers som kan tillryggalägga större avstånd på en dag, fatta sina egna beslut och arbeta med andra rovers för att komma åt svåra platser. Samordnas av Europeiska rymdorganisationen (ESA), projektet genomförde nyligen Europas största roverfälttest med 40 ingenjörer. Rättegången ägde rum i den norra kanten av Saharaöknen i Marocko, där terrängen sägs likna Mars.
Från labb till fält
Tre självkörande rovers – Mana Minnie och SherpaTT – testades under 2 veckor för att se om de skulle fungera bra i en Mars-liknande miljö. De utvecklade automatiserade navigationssystemen testades på upp till fem olika platser. "Labbtestning av hårdvaran vi designar tar inte hänsyn till den variation naturen ger från himlens ljus till landskapets form, texturen och färgerna på sanden och stenen. Att arbeta utomhus på detta sätt bevisar att våra system fungerar i mycket mer komplexa och utarbetade inställningar än vad som någonsin kan simuleras" förklarade chefen för ESA Automation and Robotics Section Gianfranco Visentin i en artikel publicerad på 'Phys.org'.
Morgondagens rovers
En av rovers, SherpaTT, reste 1,3 km helt självständigt. Faktiskt, efter att ha sett några ovanligt formade stenar, den instruerade huvudplaneraren att positionera sig bättre så att den kunde ta fler bilder. Den autonoma långdistansnavigering och beslutsfattande förmåga som demonstreras av rover är avgörande för den framtida utforskningen av Mars. "Det kommer inte att finnas skolor av analytiker för att granska varje bild - intelligenta roversystem kommer att behövas för att upptäcka vad som är intressant och skicka tillbaka det till jorden, " lade Visentin till. Data som samlats in av rovers jämfördes med en karta över platsen som skapades av en drönare före fälttestet.
PERASPERA (PERASPERA (AD ASTRA) Plan European Roadmap and Activities for Space Exploitation of Robotics and Autonomy) avslutas 2019. Projektets prestationer inkluderar nyckelteknologier och robotsystem för satellitservice i omloppsbana och planetarisk utforskning. Projektresultaten kommer att användas för att stödja ett rymduppdrag för orbital robotik som är planerat till 2023.