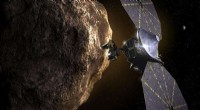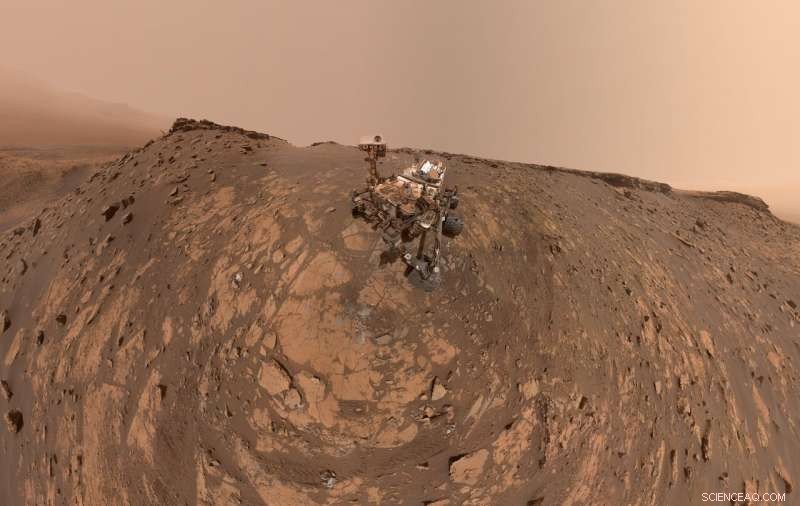
Denna selfie togs av NASA:s Curiosity Mars-rover den 26 februari, 2020 (den 2, 687:e Marsdagen, eller sol, av uppdraget). Det sönderfallande stenlagret överst på bilden är "Greenheugh Pediment, " som Curiosity klättrade strax efter att ha tagit bilden. Kredit:NASA/JPL-Caltech/MSSS
NASA:s Curiosity Mars-rover satte nyligen rekord för den brantaste terräng den någonsin klättrat, kröning av "Greenheugh Pediment, " ett brett klippskikt som sitter på toppen av en kulle. Och innan du gör det, Rover tog en selfie, fångar scenen strax nedanför Greenheugh.
Framför rovern finns ett hål som den borrade medan den tog prov på ett berggrundsmål som heter "Hutton". Hela selfien är ett 360-graders panorama sammanfogat av 86 bilder som skickats till jorden. Selfien fångar rovern cirka 11 fot (3,4 meter) under punkten där den klättrade upp på den sönderfallande frontonen.
Curiosity nådde äntligen toppen av backen den 6 mars (den 2, 696:e Marsdagen, eller sol, av uppdraget). Det tog tre körningar att ta sig upp i backen, varav den andra lutade rovern 31 grader – det mesta som rovern någonsin lutat på Mars och bara blyg för den nu inaktiva Opportunity-roverns 32-graders lutningsrekord, utspelar sig 2016. Curiosity tog selfien den 26 februari, 2020 (Sol 2687).
Sedan 2014, Nyfikenheten har rullat uppför Mount Sharp, ett 3 mil högt (5 kilometer högt) berg i centrum av Gale Crater. Roveroperatörer vid NASA:s Jet Propulsion Laboratory i södra Kalifornien kartlägger noggrant varje körning för att säkerställa att Curiosity är säker. Rovern riskerar aldrig att luta så mycket att den skulle välta – Curiositys rocker-bogie-hjulsystem gör att den kan luta upp till 45 grader säkert – men de branta körningarna gör att hjulen snurrar på plats.
Hur tas selfies?
Innan klättringen, Curiosity använde de svartvita navigeringskamerorna på sin mast för att, för första gången, spela in en kort film av sin "selfie-pinne, " annars känd som dess robotarm.
Curiositys uppdrag är att studera om marsmiljön kunde ha stött mikrobiellt liv för miljarder år sedan. Ett verktyg för att göra det är Mars Hand Lens Camera, eller MAHLI, placerad i tornet vid änden av robotarmen. Denna kamera ger en närbild av sandkorn och stenstrukturer, liknande hur en geolog använder ett handhållet förstoringsglas för en närmare titt i fältet på jorden.
Genom att vrida tornet mot roveren, teamet kan använda MAHLI för att visa nyfikenhet. Eftersom varje MAHLI-bild bara täcker ett litet område, det krävs många bilder och armpositioner för att helt fånga rovern och dess omgivningar.
"Vi får så ofta frågan hur Curiosity tar en selfie, sa Doug Ellison, en Curiosity-kameraoperatör på JPL. "Vi tänkte att det bästa sättet att förklara det skulle vara att låta rovern visa alla från sin egen synvinkel hur den görs."