LEAP-rovern är baserad på benroboten ANYmal, utvecklad vid ETH Zürich och dess spin-off ANYbotics. Kredit:ETH Zürich/RSL Robotics Labs
En fyrbent robot tränad genom artificiell intelligens har lärt sig samma läxa som Apollo-astronauterna - att hoppning kan vara det bästa sättet att röra sig på månen. En uppdatering om LEAP (Legged Exploration of the Aristarchus Plateau), en uppdragskonceptstudie som stöds av ESA för att utforska några av de mest utmanande månterrängerna, har presenterats idag vid Europlanet Science Congress (EPSC) 2022 i Granada av Patrick Bambach.
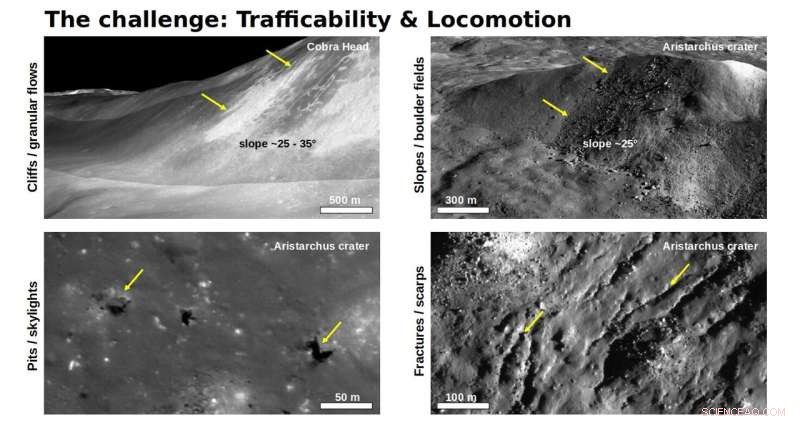
"LEAP:s mål är Aristarchus-platån, en region på månen som är särskilt rik på geologiska egenskaper men mycket utmanande att komma åt", säger Patrick Bambach från Max Planck Institute for Solar System Research i Tyskland. "Med roboten kan vi undersöka nyckelfunktioner för att studera månens geologiska historia och evolution, som ejecta runt kratrar, nya nedslagsplatser och kollapsade lavarör, där material kanske inte har förändrats av rymdvittring och andra processer. "
LEAP-teamet arbetar för att roboten ska integreras på ESA:s European Large Logistic Lander (EL3), som är planerad att landa på månen flera gånger från slutet av 2020-talet till början av 2030-talet. LEAP är baserad på benroboten ANYmal, utvecklad vid ETH Zürich och dess spin-off ANYbotics. Den är för närvarande anpassad till månmiljön av ett konsortium från ETH Zürich, Max Planck Institute for Solar System Research, OHB, University of Münster och Open University.

Olika versioner av benroboten, ANYmal, utvecklad vid ETH Zürich och dess spin-off ANYbotics. Kredit:ETH Zürich/RSL Robotics Labs
"Traditionella rovers har möjliggjort stora upptäckter på månen och Mars, men har begränsningar", sa Bambach. "Att utforska terräng med lös jord, stora stenblock eller sluttningar över 15 grader är särskilt utmanande med hjul. Till exempel fick Mars rover, Spirit, sitt uppdrag avslutat när den fastnade i sand."
ANYmal kan röra sig i olika gånggångar, vilket gör det möjligt för den att tillryggalägga stora avstånd på kort tid, klättra i branta sluttningar, använda vetenskapliga instrument och till och med återhämta sig om det osannolika skulle falla. Roboten kan också använda sina ben för att gräva kanaler i jorden, vända över stenblock eller mindre stenar för vidare inspektion och ta prover.
Inledningsvis har roboten tränats med en Reinforcement Learning-metod i en virtuell miljö för att simulera månens terräng, gravitation och dammegenskaper. Den har också placerats ut i fält för en utomhusvandring.
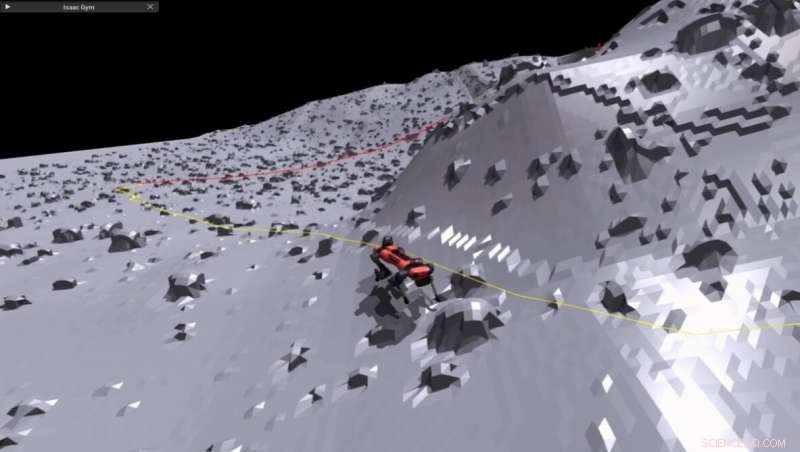
LEAP-rovern tränas med en Reinforcement Learning-metod i en virtuell miljö för att simulera månens terräng, gravitation och dammegenskaper. Kredit:ETH Zürich/RSL Robotics Labs

LEAP (Legged Exploration of the Aristarchus Plateau) är en uppdragskonceptstudie finansierad av ESA för att utforska några av de mest utmanande månterrängerna. Kredit:ETH Zürich/RSL Robotics Labs
LEAP:s mål är Aristarchus-platån, en region på månen som är särskilt rik på geologiska egenskaper men mycket utmanande att komma åt. Kredit:NASA/ESA
"Intressant nog började ANYmal använda ett hoppliknande rörelsesätt, precis som Apollo Astronauts gjorde - och insåg att hoppning kan vara mer energieffektivt än att gå", sa Bambach.
Den nuvarande designen förblir under 100 kg och inkluderar 10 kg vetenskaplig nyttolastmassa, som teoretiskt kan bära multispektrala sensorer, markpenetrerande radar, masspektrometrar, gravimetrar och annan instrumentering.
"LEAP:s förmåga att samla in utvalda prover och föra dem till ett landnings- eller uppstigningsfordon erbjuder ytterligare spännande möjligheter för provtagning av returuppdrag i mycket utmanande miljöer på månen eller Mars", säger Bambach. + Utforska vidare