Att utforska månen har blivit allt mer i fokus på sistone, särskilt med en serie landare som nyligen lanserats med olika grader av framgång. En av svårigheterna som landare och eventuella framtida mänskliga uppdrag möter är att förstå terrängen de landar på och potentiellt korsar i fallet med en rover eller människa. För att hjälpa till att bekämpa detta problem har ett team av forskare från Schweiz utvecklat ett drönarkoncept som kan hjälpa till att kartlägga några av de mer intressanta, potentiellt farliga områdena att utforska på månen.
Kartläggning av månen har redan varit en prioritet i flera år. Men några av de mer spännande regionerna, såsom Permanently Shadows Regions (PSR) vid månpolerna som innehåller en betydande mängd vattenis, har bara kartlagts till en upplösning på cirka 1m per pixel i de bästa bilderna av dem. Det inkluderar artificiell förbättring av AI-stödda algoritmer.
Den upplösningsnivån är inte i närheten av tillräckligt för att ge användbar planeringsdata för eventuella rover- eller mänskliga uppdrag – ett givet roverhjul i sig kommer inte ens mer att vara i bredd, än mindre hoppas på att korsa ett hinder av den storleken. Följaktligen måste alla rovers vi skickar kontrolleras manuellt eller ta sig fram mycket långsamt och autonomt. Med tanke på den begränsade operativa tidslinjen för dessa förväntade roveruppdrag kan den långsamma takten begränsa deras förmåga att söka efter de värdefulla resurserna och webbplatserna som forskare tror gömmer sig i PSR:erna.
Den uppenbara lösningen på detta problem är att låta en annan form av robot fungera som en scout, liknande vad Ingenuity hade gjort för Perseverance-rovern på Mars fram till nyligen. Det samarbetet hade gjort det möjligt för Perseverance att sätta rekordet för längsta endags autonoma körning på en annan planet – totalt cirka 700 m. Om en scout kunde kartlägga detaljer om månens yta framför en potentiell rover, skulle den kunna röra sig ännu snabbare än den takt som fastställts av Perseverance.
För detta ändamål har det funnits massor av planerade uppdrag för att göra just det. I en ny artikel publicerad i Acta Astronautica Romeo Tonasso och hans kollegor vid Ecole Polytechnique Federale de Lausanne beskrev sin idé och delade upp dessa befintliga uppdragskoncept i två kategorier – stora och små.
Större system kan innehålla testade kemiska framdrivningssystem från hyllan som, när de testas, kan vara skrymmande och använda potentiellt farliga kemikalier. Mindre system skulle kunna använda olika former av kemiska framdrivningar, såsom H2 O2 raketer, eller ännu mer vardagliga förflyttningsmedel, som att bokstavligen hoppa från marken med hjälp av ben. Men många av teknikerna för den typen av framdrivning är ännu inte på en tillräckligt hög utvecklingsnivå för att användas i ett praktiskt uppdrag.
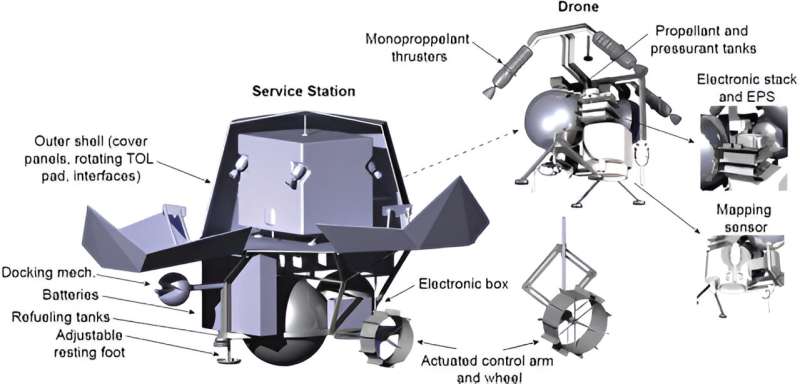
Att hitta en mellanväg mellan den äldre, tyngre trattmodellen och den nyare, oprövade var en av de ledande designbegränsningarna för det nya konceptet. Lösningen de kom fram till var en raketdriven drönare som skulle avfyras från och återvända till en basstation som kunde dras av en rover eller annat månutforskningsfordon.
Basstationen skulle tanka drönaren efter varje flygning, vilket gör att den kan göra flera flygningar utan att bära överdriven vikt av drivmedel. Med denna inställning kunde systemet kartlägga så många som 9 kvadratkilometer av månens yta med en upplösning som skulle vara till hjälp för både rover- och mänskliga uppdragsplanering. I slutet av denna ansträngning skulle basstationen behöva tankas, vilket gör att den kan fortsätta sitt uppdrag, vilket är en central del av designkonceptet.
Den här idén har andra fördelar - många andra trattar måste landa på marken, och deras framdrivningssystem kan introducera en betydande mängd kaos i månmiljön. Det är särskilt oönskat om ytan de landar på råkar innehålla kommersiellt gångbara material som vattenis. Att landa tillbaka vid en mobil dockningsstation eliminerar också eventuella dammuppstötningar, vilket avsevärt kan hindra operationer i ett område med tanke på hur lång tid det tar att lägga sig på månen.
Även om det finns några detaljer i tidningen, inklusive några arkitekturdiskussioner på hög nivå som använder rymdtestad hårdvara, så är den här idén bara ett koncept. Men när datumet för Artemis III-landningen närmar sig snabbt, skulle NASA och andra rymdorganisationer utan tvekan dra nytta av ett framgångsrikt scoutinguppdrag som det som beskrivs i tidningen. Huruvida de kommer att driva idén över mållinjen eller inte återstår dock att se.
Mer information: Roméo Tonasso et al, En månspaningsdrönare för kooperativ utforskning och högupplöst kartläggning av extrema platser, Acta Astronautica (2024). DOI:10.1016/j.actaastro.2024.02.006
Tillhandahålls av Universe Today