Inuti våra celler, och de av de mest kända livsformer, finns en mängd komplexa föreningar som kallas "molekylära motorer". Dessa biologiska maskiner är avgörande för olika typer av rörelser i levande system, från mikroskopisk omorganisation eller transport av proteiner inom en enda cell till makroskopisk sammandragning av muskelvävnader. I korsningen mellan robotik och nanoteknik, ett mycket eftertraktat mål är att hitta sätt att utnyttja dessa små molekylära motorers verkan för att utföra mer omfattande uppgifter på ett kontrollerbart sätt. Dock, att uppnå detta mål kommer säkert att vara utmanande.
"Än så länge, även om forskare har hittat sätt att skala upp den kollektiva verkan av molekylära motornät för att visa makroskopisk sammandragning, det är fortfarande svårt att effektivt integrera sådana nät i verkliga maskiner och generera krafter som är tillräckligt stora för att aktivera makroskala komponenter, "förklarar docent Yuichi Hiratsuka från Japan Advanced Institute of Science and Technology, Japan.
Lyckligtvis, Dr Hiratsuka, i samarbete med docent Takahiro Nitta från Gifu University och professor Keisuke Morishima från Osaka University, både i Japan, har nyligen gjort anmärkningsvärda framsteg i strävan att överbrygga mikro med makro. I deras senaste studie publicerad i Naturmaterial , detta forskargrupp rapporterade designen av en ny typ av ställdon som drivs av två genetiskt modifierade biomolekylära motorer. En av de mest attraktiva aspekterna av deras biologiskt inspirerade tillvägagångssätt är att ställdonet självmonteras från de grundläggande proteinerna genom enkel ljusbestrålning. På några sekunder efter att ljuset träffat ett visst område, de omgivande motorproteinerna smälter ihop med skenliknande proteiner som kallas mikrotubuli och ordnar sig i en hierarkisk makroskopisk struktur som liknar muskelfibrer.
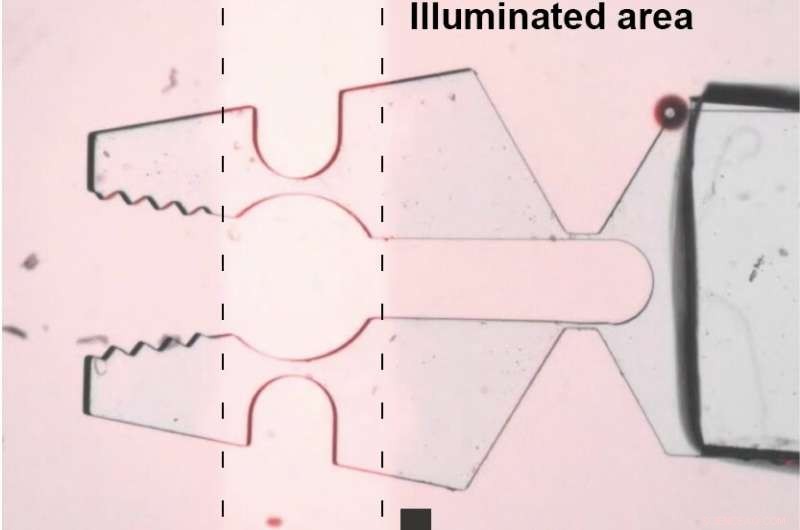
Vid bildning runt målzonen (upplyst), denna "konstgjorda muskel" dras ihop direkt, och de individuella motorproteinernas kollektiva kraft förstärks från en molekylär skala till en millimeter. Som forskarna visade experimentellt, deras tillvägagångssätt kan vara idealiskt för småskaliga robotapplikationer, såsom aktivering av mikroskopiska gripare för att hantera biologiska prover (figur 1). Andra millimeterskaliga applikationer som också demonstrerats inkluderar sammanfogning av separata komponenter, som miniatyrhjul, och driver minimalistiska robotarmar för att göra en insektliknande krypande mikrorobot.
Det som också är mycket anmärkningsvärt med denna teknik är att den är kompatibel med befintliga 3D -utskriftstekniker som använder ljus, såsom stereolitografi. Med andra ord, mikroroboter med inbyggda konstgjorda muskler kan vara 3D-skrivbara, möjliggör deras massproduktion och därmed ökar deras tillämpbarhet för att lösa olika problem. "I framtiden, vårt utskrivbara ställdon kan bli det välbehövliga "ställdonsbläck" för sömlös 3D-utskrift av hela robotar. Vi tror att ett sådant biomolekylbaserat bläck kan skjuta fram robotikens gräns genom att möjliggöra utskrift av komplexa ben- och muskelkomponenter som krävs för att robotar ska likna levande varelser, säger doktor Hiratsuka.
En potentiell förbättring av den nuvarande tekniken skulle vara att hitta sätt att effektivt dekontrahera de artificiella musklerna (reversibilitet). Alternativt, den nuvarande strategin kan också ändras för att producera spontant oscillerande beteende istället för kontraktion, som observeras i de mobila cilierna hos mikrober eller i insektsflygmuskler.
Hur som helst, denna studie visar effektivt hur efterlikning av de strategier som naturen har tagit fram ofta är ett recept på framgång, som många forskare inom robotik redan har kommit på.