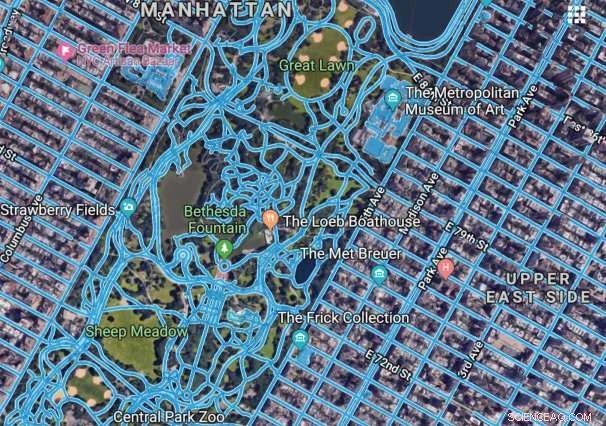
För att skapa kompletta vägkartor måste företag som Google ofta låta anställda ta befintliga flygbilder med ofullständig information och fylla i luckorna manuellt. Kredit:Massachusetts Institute of Technology
Kartappar kan ha förändrat vår värld, men de har fortfarande inte kartlagt allt ännu. Specifikt, Att kartlägga vägar kan vara svårt och tråkigt:Även efter att ha tagit flygbilder, företag måste fortfarande lägga många timmar på att manuellt spåra vägar. Som ett resultat, till och med företag som Google har ännu inte hunnit kartlägga den stora majoriteten av de mer än 20 miljoner miles av vägar över hela världen.
Luckor i kartor är ett problem, särskilt för system som utvecklas för självkörande bilar. För att lösa problemet, forskare från MIT:s datavetenskap och artificiell intelligens Laboratory (CSAIL) har skapat RoadTracer, en automatiserad metod för att bygga vägkartor som är 45 procent mer exakt än befintliga tillvägagångssätt.
Använda data från flygbilder, teamet säger att RoadTracer inte bara är mer exakt, men mer kostnadseffektiva än nuvarande tillvägagångssätt. MIT-professorn Mohammad Alizadeh säger att detta arbete kommer att vara användbart både för teknikjättar som Google och för mindre organisationer utan resurser för att kurera och korrigera stora mängder fel i kartor.
"RoadTracer är väl lämpad för att kartlägga områden i världen där kartor ofta är inaktuella, som inkluderar både platser med lägre befolkning och områden där det är frekvent byggande, säger Alizadeh, en av medförfattarna till ett nytt papper om systemet. "Till exempel, befintliga kartor för avlägsna områden som landsbygden i Thailand saknar många vägar. RoadTracer kan hjälpa till att göra dem mer exakta."
Till exempel, tittar på flygbilder över New York City, RoadTracer kunde korrekt kartlägga 44 procent av sina vägkorsningar, vilket är mer än dubbelt så effektivt som traditionella metoder baserade på bildsegmentering som bara kunde kartlägga 19 procent.
Pappret, som kommer att presenteras i juni på Conference on Computer Vision and Pattern Recognition (CVPR) i Salt Lake City, Utah, är ett samarbete mellan CSAIL och Qatar Computing Research Institute (QCRI).
Alizadehs MIT-medförfattare inkluderar doktorander Fayven Bastani och Songtao He, och professorerna Hari Balakrishnan, Sam Madden, och David DeWitt. QCRI medförfattare inkluderar senior mjukvaruingenjör Sofiane Abbar och Sanjay Chawla, som är forskningschef för QCRI:s Data Analytics Group.
Nuvarande ansträngningar för att automatisera kartor innebär att man tränar neurala nätverk för att titta på flygbilder och identifiera enskilda pixlar som antingen "väg" eller "inte väg." Eftersom flygbilder ofta kan vara tvetydiga och ofullständiga, sådana system kräver också ett efterbearbetningssteg som syftar till att försöka fylla i några av luckorna.
Tyvärr, dessa så kallade "segmenteringsmetoder" är ofta oprecisa:Om modellen felmärker en pixel, det felet kommer att förstärkas i den slutliga färdplanen. Fel är särskilt troliga om flygbilderna har träd, byggnader, eller skuggor som skymmer var vägar börjar och slutar. (Efterbehandlingssteget kräver också att man fattar beslut baserat på antaganden som kanske inte alltid håller, som att koppla ihop två vägavsnitt helt enkelt för att de ligger bredvid varandra.)
Under tiden, RoadTracer skapar kartor steg för steg. Den börjar på en känd plats på vägnätet, och använder ett neuralt nätverk för att undersöka det omgivande området för att avgöra vilken punkt som mest sannolikt är nästa del på vägen. Den lägger sedan till den punkten och upprepar processen för att gradvis spåra vägnätet ett steg i taget.
"Istället för att ta tusentals olika beslut samtidigt om huruvida olika pixlar representerar delar av en väg, RoadTracer fokuserar på det enklare problemet att ta reda på vilken riktning man ska följa när man startar från en viss plats som vi vet är en väg, " säger Bastani. "Detta är på många sätt faktiskt mycket närmare hur vi som människor konstruerar mentala modeller av världen omkring oss."
Teamet tränade RoadTracer på flygbilder av 25 städer i sex länder i Nordamerika och Europa, och utvärderade sedan dess kartläggningsförmåga på 15 andra städer.
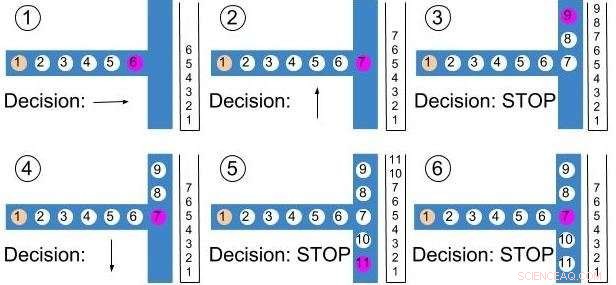
För att skapa en färdplan, systemet startar på en känd plats och använder ett neuralt nätverk för att undersöka det omgivande området för att avgöra vilken punkt som mest sannolikt är nästa del på vägen. Den lägger sedan till den punkten och upprepar processen för att gradvis spåra vägen ett steg i taget. Kredit:Massachusetts Institute of Technology
"Det är viktigt för ett kartsystem att kunna prestera bra i städer som det inte har tränat på, eftersom regioner där automatisk mappning är mest lovande är sådana där befintliga kartor är obefintliga eller felaktiga, säger Balakrishnan.
Bastani säger att det faktum att RoadTracer hade en felfrekvens som är 45 procent lägre är väsentligt för att göra automatiska kartsystem mer praktiska för företag som Google.
"Om felfrekvensen är för hög, då är det mer effektivt att kartlägga vägarna manuellt från början jämfört med att ta bort felaktiga segment från den antagna kartan, säger Bastani.
Fortfarande, Att implementera något som RoadTracer skulle inte ta människor helt ur kretsen:Teamet säger att de kunde föreställa sig att systemet skulle föreslå färdplaner för en stor region och sedan låta en mänsklig expert komma in för att dubbelkolla designen.
"Som sagt, Det som är uppenbart är att med ett system som vårt kan du dramatiskt minska mängden tråkigt arbete som människor skulle behöva göra, " säger Alizadeh.
Verkligen, en fördel med RoadTracers inkrementella tillvägagångssätt är att det gör det mycket lättare att korrigera fel; mänskliga handledare kan helt enkelt korrigera dem och köra om algoritmen där de slutade, istället för att fortsätta använda oprecis information som sipprar ner till andra delar av kartan.
Självklart, flygbilder är bara en pusselbit. De ger dig inte information om vägar som har över- och gångtunneler, eftersom de är omöjliga att fastställa från ovan. Som ett resultat, teamet utvecklar också separat algoritmer som kan skapa kartor från GPS-data, och arbetar för att slå samman dessa tillvägagångssätt till ett enda system för kartläggning.
Den här historien återpubliceras med tillstånd av MIT News (web.mit.edu/newsoffice/), en populär webbplats som täcker nyheter om MIT-forskning, innovation och undervisning.